RT-DeTr实时端到端Transformer对象检测从训练到部署

RT-DeTr实时端到端Transformer对象检测从训练到部署

OpenCV学堂
发布于 2026-04-02 19:57:24
发布于 2026-04-02 19:57:24
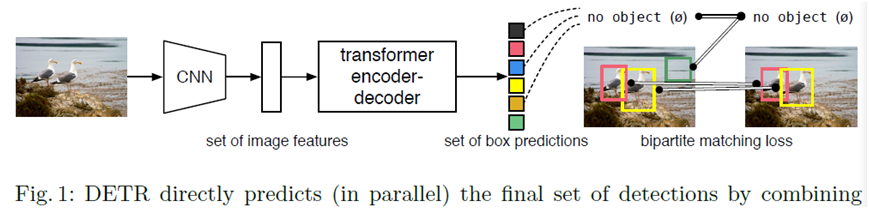
第一个端到端基于Transformer的对象检测模型,采用CNN + Transformer混合架构
图片
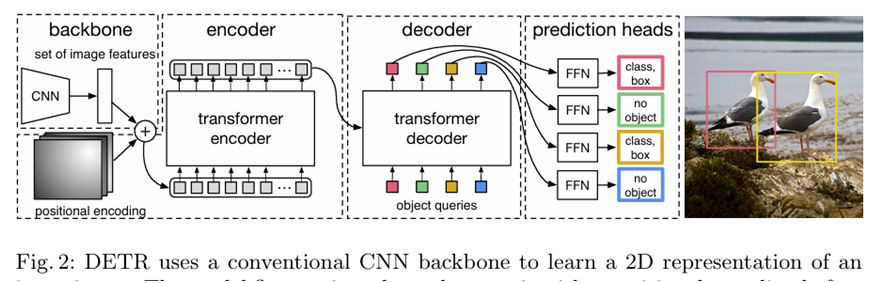
官方的Backbone部分采用ResNet系列模型,Transformer部分采用标准的编码器与解码器结构,最后通过FFN直接预测,通过可学习NMS实现直接预测结果。
图片
百度在此基础上提出了实时DETR模型,最新版本为RTDeTRv2版本,其中RTDeTR已经被YOLOv8官方收录,支持按照YOLOv8~YOLO11系列模型那样从训练到部署。
模型训练
训练的命令行如下:
yolo detect train model=rtdetr-l.pt data=bee_ant.yaml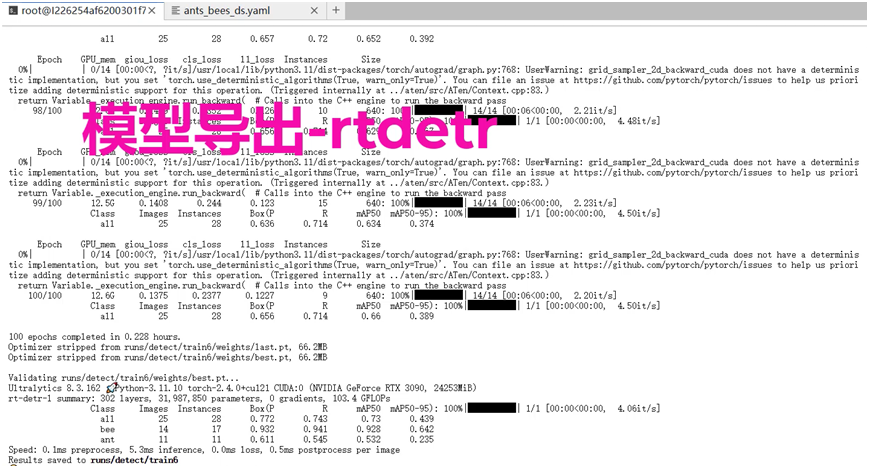
图片
模型导出
yolo export model=best.pt format=onnx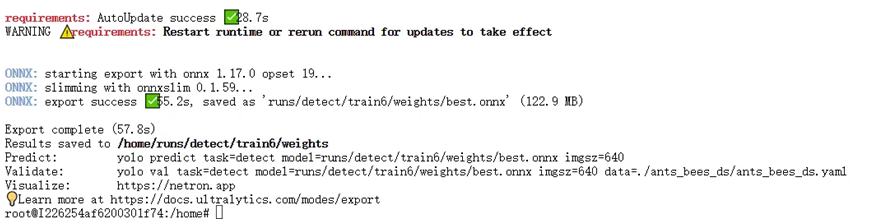
图片
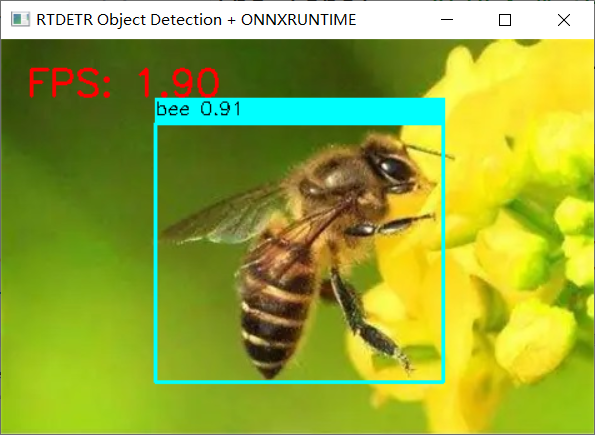
推理演示
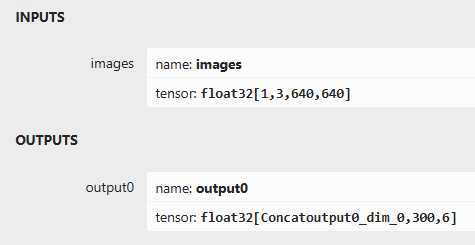
导出ONNX格式模型的输入与输出信息如下:
图片
其中输出数据格式如下:
1x300x6300表示预测框的数目、6前面四个数据是cx,cy,w,h 是0~1之间的值,后面两个分别是ant与bee的类别得分。
图片
导出预训练rtdetr-l.pt模型为ONNX格式
from ultralytics import RTDETR
# Load a COCO-pretrained RT-DETR-l model
model = RTDETR("rtdetr-l.pt")
# Display model information (optional)
model.info()
model.export(format="onnx", imgsz=640)推理测试:

图片
ONNXRUNTIME部署代码
onnxpath="D:/python/yolov5-7.0/rtdetr-ant-bee-best.onnx"
rtdetr_path = "rtdetr-l.onnx"
model = ort.InferenceSession(rtdetr_path)
frame = cv.imread("D:/kgroup.jpg")
bgr = format_yolov8(frame)
img_h, img_w, img_c = bgr.shape
start = time.time()
image = cv.dnn.blobFromImage(bgr, 1 / 255.0, (640, 640), swapRB=True, crop=False)
res = model.run(None, {'images': image})[0]
rows = np.squeeze(res, 0)
x_factor = img_w / 640
y_factor = img_h / 640
for r in range(rows.shape[0]):
row = rows[r]
classes_scores = row[4:]
class_id = np.argmax(classes_scores)
conf = classes_scores[class_id]
if conf>0.25:
x, y, w, h = row[0].item(), row[1].item(), row[2].item(), row[3].item()
left = int((x - 0.5 * w) * 640) * x_factor
top = int((y - 0.5 * h) * 640) * x_factor
width = int(w * 640) * x_factor
height = int(h * 640) * x_factor
box = [int(left), int(top), int(width), int(height)]
color = colors[class_id % len(colors)]
cv.rectangle(frame, box, color, 2)
cv.rectangle(frame, (box[0], box[1] - 20), (box[0] + box[2], box[1]), color, -1)
cv.putText(frame, class_list[class_id] + (" %.2f"%conf), (box[0], box[1] - 7), cv.FONT_HERSHEY_SIMPLEX, .5, (0, 0, 0))
end = time.time()
inf_end = end - start
fps = 1 / inf_end
fps_label = "FPS: %.2f" % fps
cv.putText(frame, fps_label, (20, 45), cv.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)
cv.imshow("RTDETR Object Detection + ONNXRUNTIME", frame)
cc = cv.waitKey(0)
cv.destroyAllWindows()OpenVINO2025
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-07-17,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号