在NVIDIA Jetson Orin Nano 8GB部署NemoClaw
原创
在NVIDIA Jetson Orin Nano 8GB部署NemoClaw
原创
用户4730701
发布于 2026-06-03 13:07:35
发布于 2026-06-03 13:07:35
OpenClaw是一个强大的开源AI Agent平台,被业界形容为“AI智能体的操作系统”。
然而这样强大的自主AI Agent,可以发出任意网络请求、存取主机文件系统,并调用任何推理端点,如果没有防护措施,就会像一匹脱缰的野马,将带来严重的安全、成本和合规性风险。
为了在“强大”与“制约”之间取得有效平衡,NVIDIA在2026年3月的GTC大会中,推出了基于OpenShell技术的NemoClaw管理器,利用沙箱(sandbox)容器技术对OpenClaw智能体的权限范围进行约束,确保系统的安全性。
本文要带着大家在 Jetson Orin Nano 8GB 系统上安装NemoClaw,因为这个设备的资源非常紧凑,能在这里装上去并使用的话,那其他资源更丰富的设备上就能得到更好的效果。
NemoClaw原理说明
下图是NemoClaw官网(https://docs.nvidia.com/nemoclaw/about/how-it-works)所提供的高阶架构图:
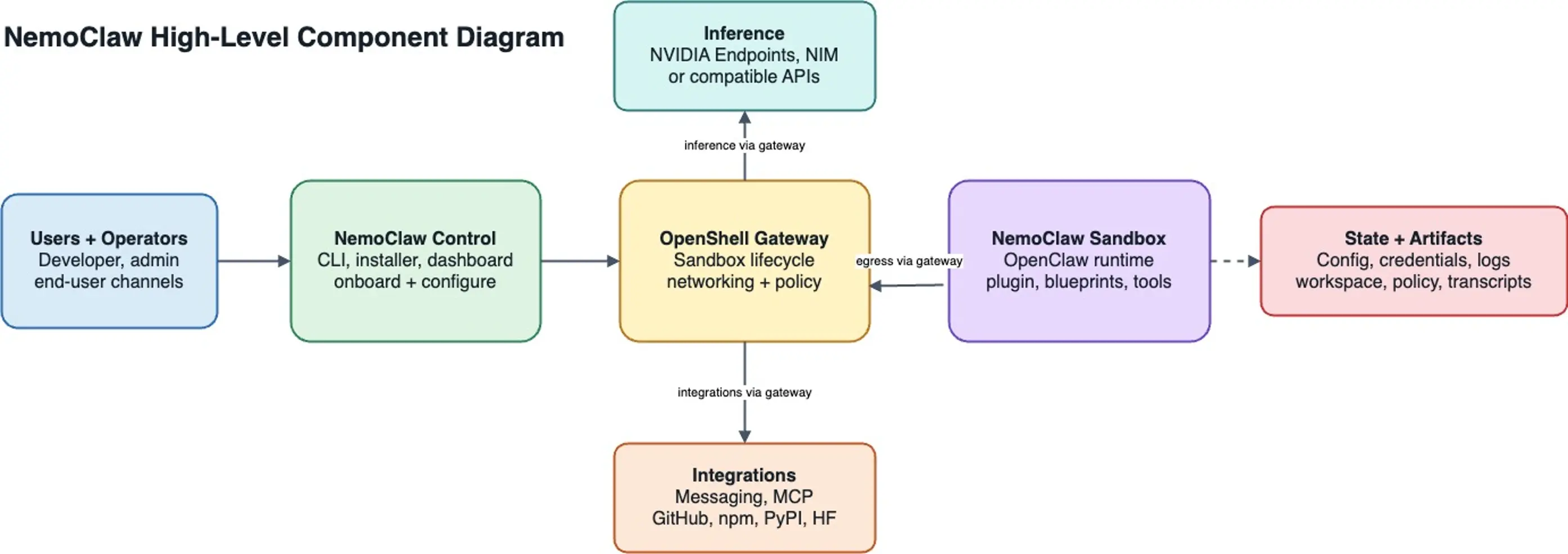
现在做些简单的说明:
- Users+Operators(最左边):使用者(人),包含开发者、管理员、终端用户等
- NemNemoClaw Control(左二):作为使用者对沙箱进行管理的交流界面,提供一组CLI或Dashboard,接收使用者对沙箱的初始化、配置与管理生命周期的要求;
- OpenShell Gateway(中间):主要基于K3S技术,是真正对沙箱的生命周期(创建/销毁)、网络/安全策略进行管理的机制;
- NemoClaw Sandbox(右二):OpenClaw真正执行的安全执行环境(容器);
- State+Artifacts(最右边):存放这个沙箱所创建的配置文件、凭证、日志、工作区、策略、对话记录等待;
- Inference(上方):添加推理的能力,如接到NVIDIA端点、NIM服务、网上服务上(OpenAI、Anthropic、阿里。。)或本地的Ollama、vllm、llama.cpp之类的兼容API;
- Integrations(下方):与外界沟通的消息服务、MCP、GitHub、HuggingFace、npm、PyPI等等。
上图可以清楚地看到,NemoClaw透过OpenShell将OpenClaw执行范围都封藏在沙箱里面,与外界的所有互动都必须在OpenShell安全策略的控制下进行。如此让OpenClaw在沙箱内可以发挥完整的功能,又不会越界去执行危害系统的行为,这是非常符合实际应用的处理方式。
下面提供一个比较形象的各元件的角色与功能,让大家能更容易掌握之间的差异:
- NemoClaw是总指挥,提供一键安装、编排OpenShell和OpenClaw的协同工作
- OpenShell是保安系统,提供沙箱隔离、策略引擎、隐私路由
- Sandbox是隔离的办公室,OpenClaw 实际运行的容器化环境,受 OpenShell 管控
- OpenClaw是AI员工,在 Sandbox 内部执行具体任务的 AI智能体
优化 Jetson Orin Nano 8GB
OpenClaw是个AI智能体,必须依赖LLM模型提供处理事务的智能,通常分为线上或本地两种方式。但大部分LLM模型都在 4GB以上规模,这对于仅有8GB显存的设备会相当吃力,因此在部署之前需要先对设备进行一些优化,确保系统能够持续正常的运行。
主要优化内容如下:
1. 调整系统记忆体(必须做),包括以下步骤:
- 删除系统内置的4GB ZRAM 虚拟内存,但在大部分状况下用不到,最后直接删除以腾出更多资源。执行步骤如下:
sudo systemctl disable nvzramconfig cd /etc/systemd && sudo mv nvzramconfig.sh nvzramconfig.sh.orig - 创建8GB交换空间:
sudo fallocate -l 8G /swapfile sudo chmod 600 /swapfile sudo mkswap /swapfile sudo swapon /swapfile # 永久生效 echo '/swapfile none swap sw 0 0' | sudo tee -a /etc/fstab - 关闭GUI图形桌面:可以节省 800MB 左右记忆体
sudo systemctl set-default multi-user.target - 执行
sudo reboot重启系统,让前面的配置生效
2. 为Docker配置 “免sudo” 操作,让NemoClaw安装能自动完成:
- Jetson Orin Nano 配置的 Jetpack 6.2.2 版本工作环境,已经内置 Docker 与 nvidia-container 功能,因此不需要再单独安装,只需要执行以下指令即可:
sudo usermod -aG docker $USER && newgrp docker - 为了要提高拉取 Docker 镜像文件的效率,建议在 /etc/docker/daemon.json 里添加国内的镜像网站,操作如下:
sudo nano / etc/docker/daemon.json # 在里面添加以下内容: "registry-mirrors": [ "https://docker.m.daocloud.io", "https://docker.mirrors.ustc.edu.cn", "https://hub-mirror.c.163.com" ], # 按 Ctrl-x 存档t退出 # 执行以下指令重启 Docker sudo systemctl daemon-reload && sudo systemctl restart ollama.service
3. 安装推理框架:
- 目前业界比较常用的推理框架,主要有ollama、vllm、llama.cpp、LMStudio等等。对Jetson Orin Nano 8GB 来说,在考量开销、性能与稳定性的多方因素下,原厂推荐使用 ollama 推理平台是最稳妥而且容易上手。
- 安装ollama只需要执行
curl -fsSL https://ollama.com/install.sh | sh这样一道指令就行,安装好就能执行使用。 - 执行
ollama list可以检查服务是否启动?如果未启动就执行ollama serve来启动
4. 选择合适的模型:
- 官方推荐用千问的 Qwen 3.5 2B(Q4_K_M)模型,初上手者直接先用这个就行。
- 安装好 Ollama 之后,执行
ollama pull qwen3.5:2b从ollama官网直接下载,模型大小约2.7GB。 - 执行
ollama list可以检查是否已经下载到本地
5. 启用 Jetson 的最高性能(Super)模式(性能 + 内存优化) sudo nvpmodel -m 2 && sudo jetson_clocks
sudo nvpmodel -m 2 && sudo jetson_clocks完成以上的预设置作业之后,现在就可以准备安装NemoClaw了。
安装 NemoClaw
NVIDIA 虽然提供curl -fsSL https://www.nvidia.com/nemoclaw.sh | bash这样一条很简单的安装指令,过程中需要下载很多东西,包括 github代码仓、npm、docker 镜像、python包等等内容,在缺乏特殊网络的辅助下,很难一次就完成。
推荐的安装方式是先从Github代码仓下载最基础文件,但代码仓 https://github.com/NVIDIA/NemoClaw 完整的项目内容有 49000+ 文件,通常难以下载完成。而我们需要的就是最基础的文件其实不到 2000 个。
可以在下面两种方式中选择一种来操作:
1. 执行下面指令,下载最基础的文件:
git clone --depth 1 --single-branch https://github.com/NVIDIA/NemoClaw.git 2. https://github.com/NVIDIA/NemoClaw 网页下载 NemoClaw-main.zip(约7MB)到本地后,解压缩生成 NemoClaw-main 文件夹,将文件夹改名为 NemoClaw
接着用代码仓里的 install.sh 进行安装
cd NemoClaw && chmod +x install.sh && ./install.sh然后会开始按照以下步骤进行:
- NemoClaw启动画面:
- [1/3] 安装 Node.js:
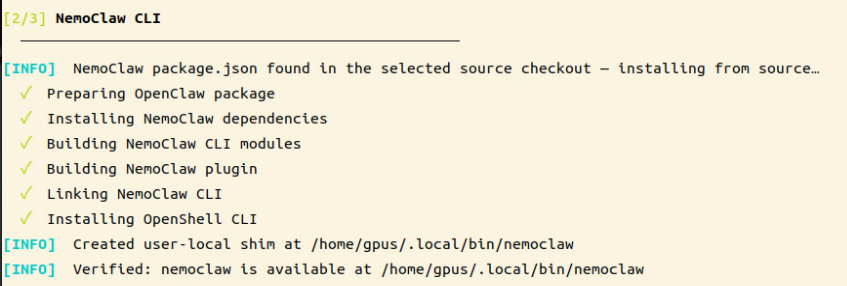
- [2/3] 安装 NemoClaw CLI:
- [3/3] Onboarding(NemoClaw进行配置)
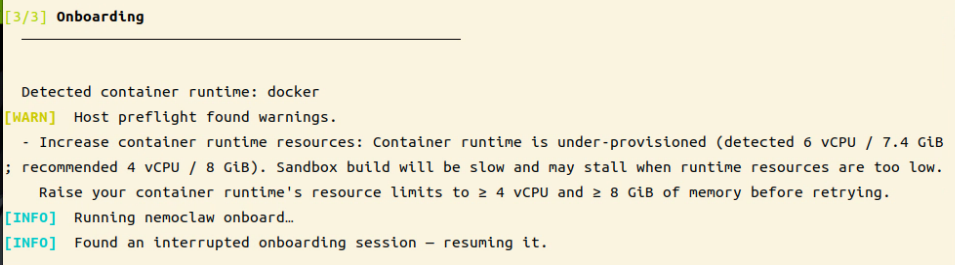
接下去就会开始 8 个配置步骤:
- [1/8] Preflight checks 与 [2/8] Starting OpenShell gateway :如果网络顺畅的话会顺利完成!如果这里出现问题需要重新进行配置的话,只要在执行
nemoclaw onboard --no-gpu即可。 - [3/8] Configuring inference provider:选择推理的LLM来源。我们在前面安装的 Ollama 与下载的
qwen3.5:2b模型,就要在这个步骤中填入:- 在 Inference options 部分选择 “ 7) Local Ollama (localhost:11434) — running (suggested) ",NemoClaw已经检测到系统上安装了 Ollama;
- 在 Ollama models 选项中就填入 qwen3.5:2b 前面的编号,例如“1”
一切顺利的话,NemoClaw 会为我们做好配置

- 下一步就是要创建可以执行 OpenClaw 的 Sandbox 名称。例如我们需要这个 Sandbox 作为网上信息整理与透过指定的通信软件进行提示的应用,可以命名为 my-info-assis。命名是有要求的:
- 英语字母(只能小写)、数字与“-”,中间不能有空格
- 最长为63个字符,以字母开头、字母或数字结尾

然后会显示这个沙箱的信息,确认无误就确认往下继续进行。
- [4/8] Setting up inference provider:NemoClaw 开始创建 my-info-assis 沙箱。这里会询问是否启动 Brave 搜索功能(“Enable Brave Web Search? [y/N]: ”),这里选 N 就行。
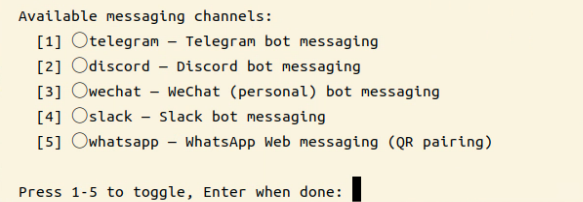
- [5/8] Messaging channels:这里就是让使用者选择想用的通讯软件。不过本文先略过选项与配置,直接按 "Enter" 继续往下,后面还可以透过 NemoClaw CLI 进行设置
接下去还提供 6 种沙箱资源配置原则,新上手的选择“ 1)creator (cpu=50%, ram=50%) ” 比较合适。
- [6/8] Creating sandbox:NemoClaw 启动 docker composer 来创建刚刚配置的 my-info-assis 沙箱,这是最耗费时间的步骤.过程中需要下载 ghcr.io/nvidia/nemoclaw/sandbox-base:v0.0.54(1.2GB),然后生成一个 openshell/sandbox-from:xxxxxxxxxx 镜像文件。可以用
docker images检查,如下:

如果下载 ghcr.io/nvidia/nemoclaw/sandbox-base:v0.0.54 镜像没完成,可以直接用下面指令下载:
docker pull ghcr.io/nvidia/nemoclaw/sandbox-base:v0.0.54 这个镜像文件只需要下载一次就行,后面再创建其他沙箱就容易得多。
每次创建沙箱,就是生成一个 openshell/sandbox-from:xxxxxxxxxx 镜像文件
- [7/8] Setting up OpenClaw inside sandbox:到这里表示沙箱创建完成
- [8/8] Policy presets:现在一个策略原则,初学者选择 Balanced 即可,直接按 Enter 往下。下面会继续显示这个策略里的细节,目前先不用自行修改,再按一次 Enter 往下。
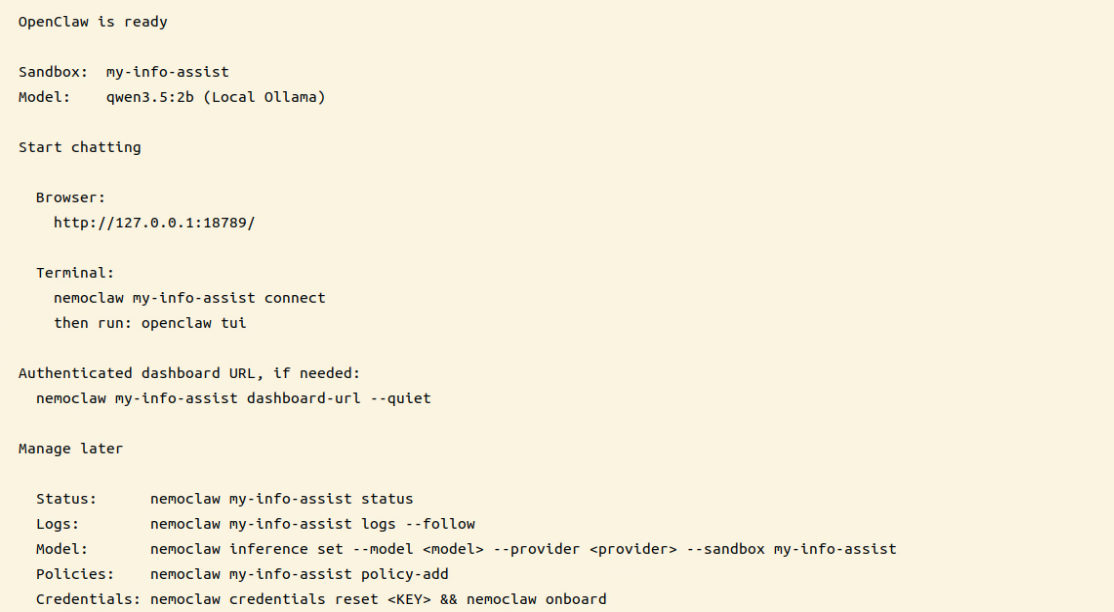
接着 NemoClaw 会进行完整的配置,如果一切顺利,最后会显示如下的信息:
进入沙箱启动 OpenClaw
- 执行
nemoclaw <sandbox-name> connect进入沙箱容器内; - 进入沙箱容器内, 命令行显示为
sandbox@xxxxxxxxxxxx:~$表示在容器内工作; - 执行
openclaw tui就会进入其终端交互模式,如下图:

现在就可以在 NemoClaw 的安全范围里,尽情地操控OpenClaw了。【完】
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号