从互斥锁到CAS原子操作:高并发架构中的同步机制演进与创新设计

从互斥锁到CAS原子操作:高并发架构中的同步机制演进与创新设计

用户9565775
发布于 2026-06-26 08:46:01
发布于 2026-06-26 08:46:01
并发控制技术的演进背景与挑战
并发问题的本质
在多线程编程和分布式系统中,多个执行单元同时访问共享资源时,如果不加以控制,就会导致数据不一致和程序行为异常。这些问题的根本原因在于,现代计算机系统的多级存储架构和并行执行能力使得指令执行顺序与程序编写顺序可能不一致。例如,在多核处理器中,每个核心都有自己的缓存,对共享内存的读写操作可能在不同核心的缓存中以不同顺序可见。
传统锁机制的局限性
早期解决并发问题的主要手段是使用各种锁机制,包括互斥锁、读写锁、自旋锁等。锁机制通过确保同一时刻只有一个执行单元能够访问受保护的共享资源,从而避免竞争条件。然而,传统锁机制存在以下主要问题:
- 性能瓶颈:锁的引入导致了线程阻塞和上下文切换,在高并发场景下会显著降低系统吞吐量。特别是在“锁竞争”严重的情况下,大量线程会因等待锁释放而被阻塞,系统资源无法得到充分利用。
- 死锁风险:当多个线程相互等待对方释放锁时,系统可能会陷入死锁状态,导致部分或全部线程无法继续执行。死锁的检测和恢复需要额外的系统开销,且在某些情况下难以完全避免。
- 扩展性问题:在分布式系统中,传统的进程内锁机制无法直接扩展到跨进程或多节点的场景,需要引入更复杂的分布式锁方案,而这些方案通常带来更高的延迟和复杂性。
- 优先级反转:在高实时性系统中,低优先级任务持有锁而高优先级任务等待的情况会导致优先级反转,影响系统的实时性保证。
下图对比了传统锁机制与CAS操作的主要差异:

CAS操作的技术原理与实现机制
CAS的基本概念
CAS(Compare-and-Swap)是一种原子操作,用于在多线程环境下实现无锁的同步机制。CAS操作包含三个操作数:内存位置(V)、预期原值(A)和新值(B)。当且仅当内存位置V的值等于预期原值A时,处理器才会自动将内存位置V的值更新为新值B,否则不做任何操作。无论哪种情况,CAS操作都会返回内存位置V的当前值。
从硬件层面看,CAS操作通常由CPU提供专门的原子指令实现,如x86架构的CMPXCHG指令。这些指令在指令执行期间会锁定总线或缓存行,确保操作的原子性,但这种锁定是极为短暂的,通常仅持续几个时钟周期,远短于操作系统级锁的持有时间。
CAS在Java中的实现
在Java中,CAS操作主要通过sun.misc.Unsafe类提供的本地方法实现,这些方法进一步调用JVM和操作系统提供的原子指令。Java并发包(java.util.concurrent)中的许多类,如AtomicInteger、AtomicLong、AtomicReference等,都是基于CAS操作构建的。
以下是一个简单的CAS操作示例,展示了如何使用AtomicInteger实现线程安全的计数器:
import java.util.concurrent.atomic.AtomicInteger;
public class CASExample {
// 使用AtomicInteger实现基于CAS的计数器
private AtomicInteger counter = new AtomicInteger(0);
/**
* 线程安全的自增操作
* 使用CAS机制避免传统锁的开销
*/
public void increment() {
int oldValue, newValue;
do {
// 获取当前值作为预期原值
oldValue = counter.get();
// 计算新值
newValue = oldValue + 1;
// 尝试CAS更新:如果当前值仍等于oldValue,则更新为newValue
} while (!counter.compareAndSet(oldValue, newValue));
// 循环直到CAS成功(没有其他线程同时修改)
}
/**
* 获取当前计数值
*/
public int getValue() {
return counter.get();
}
/**
* 模拟多线程环境下的计数器使用
*/
public static void main(String[] args) throws InterruptedException {
final CASExample example = new CASExample();
final int threadCount = 10;
final int incrementsPerThread = 1000;
Thread[] threads = new Thread[threadCount];
// 创建并启动多个线程同时增加计数器
for (int i = 0; i < threadCount; i++) {
threads[i] = new Thread(() -> {
for (int j = 0; j < incrementsPerThread; j++) {
example.increment();
}
});
threads[i].start();
}
// 等待所有线程完成
for (Thread thread : threads) {
thread.join();
}
// 验证结果:应为threadCount * incrementsPerThread
System.out.println("最终计数值: " + example.getValue());
System.out.println("期望值: " + (threadCount * incrementsPerThread));
System.out.println("结果正确: " + (example.getValue() == threadCount * incrementsPerThread));
}
}CAS与内存屏障
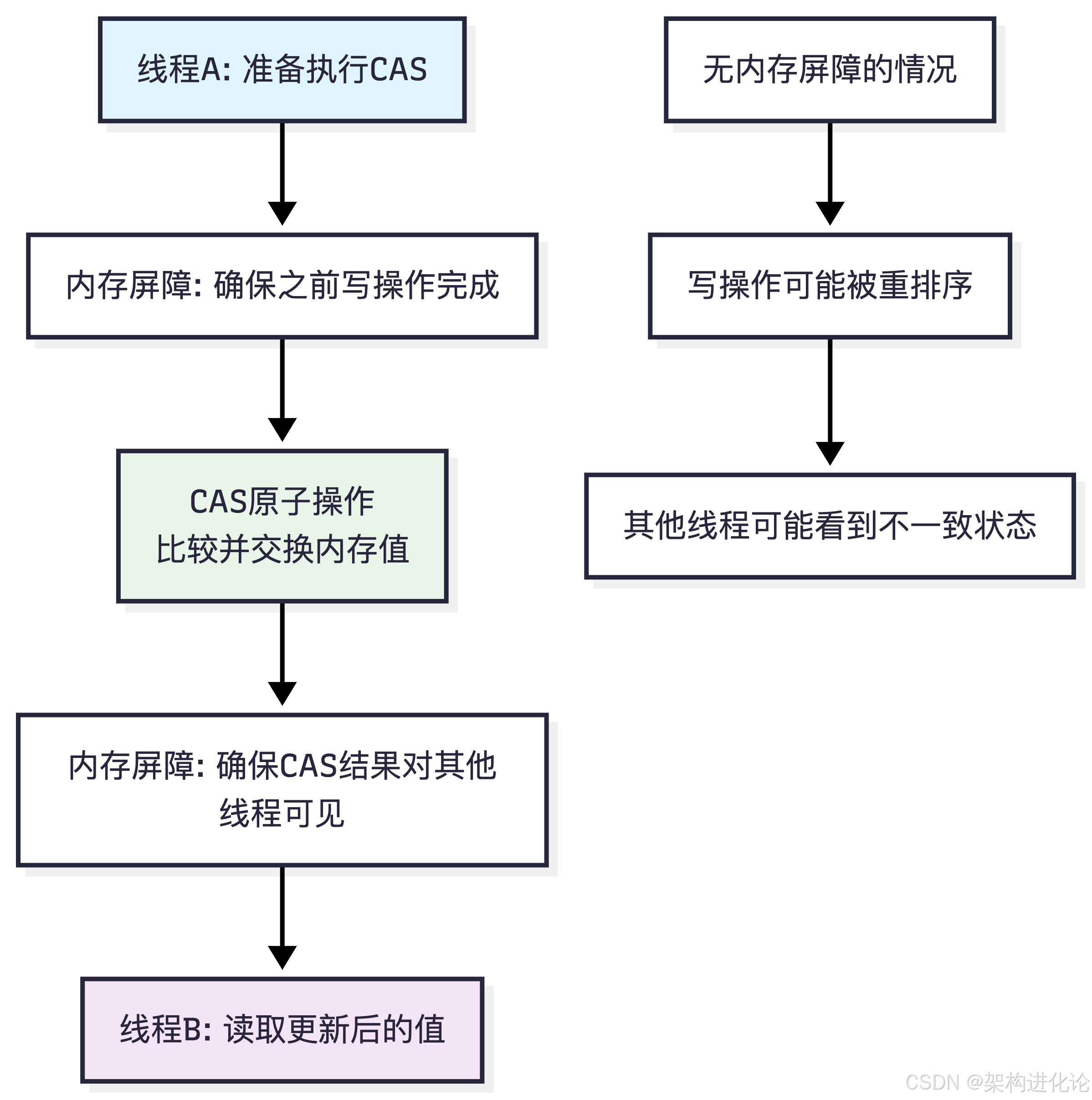
现代处理器为了提升性能,会对内存访问指令进行重排序,这在单线程环境下是安全的,但在多线程环境下可能导致可见性问题。CAS操作通常伴随着隐式的内存屏障(Memory Barrier),确保操作完成前所有之前的内存操作对其他处理器可见,从而保证了内存一致性。
以下是CAS操作与内存屏障的关系示意图:
CAS操作的典型问题与解决方案
ABA问题
ABA问题是CAS操作中的一个经典挑战。假设一个变量的初始值为A,线程1准备将其修改为C。在执行CAS之前,线程2将值从A改为B,然后又改回A。此时线程1执行CAS操作,发现当前值仍为A,于是认为没有被修改过,成功将A更新为C。尽管CAS操作本身是成功的,但变量的历史状态已经发生了变化,这可能导致程序逻辑错误。
解决ABA问题的常见方法是引入版本号机制。每次变量更新时,版本号都递增,CAS操作同时检查值和版本号。Java中的AtomicStampedReference类就是基于这种思路实现的。
以下是使用AtomicStampedReference解决ABA问题的示例:
import java.util.concurrent.atomic.AtomicStampedReference;
public class ABASolutionExample {
// 使用AtomicStampedReference包装共享数据
private AtomicStampedReference<String> sharedData =
new AtomicStampedReference<>("初始值", 0);
/**
* 线程安全的更新操作,解决ABA问题
* @param expectedValue 期望的原值
* @param newValue 新值
* @return 更新是否成功
*/
public boolean safeUpdate(String expectedValue, String newValue) {
int[] stampHolder = new int[1];
String currentValue;
// 重试直到成功或达到最大尝试次数
for (int i = 0; i < 10; i++) {
// 同时获取当前值和版本戳
currentValue = sharedData.get(stampHolder);
int currentStamp = stampHolder[0];
// 检查当前值是否符合预期
if (!currentValue.equals(expectedValue)) {
System.out.println("值已被其他线程修改,当前值: " + currentValue);
return false;
}
// 尝试CAS更新:同时检查值和版本戳
if (sharedData.compareAndSet(
currentValue,
newValue,
currentStamp,
currentStamp + 1)) {
System.out.println("更新成功: " + currentValue + " -> " + newValue +
", 新版本号: " + (currentStamp + 1));
return true;
}
System.out.println("第" + (i + 1) + "次CAS失败,重试中...");
}
System.out.println("更新失败,已达到最大重试次数");
return false;
}
/**
* 模拟ABA问题场景
*/
public static void main(String[] args) throws InterruptedException {
ABASolutionExample example = new ABASolutionExample();
Thread thread1 = new Thread(() -> {
// 线程1尝试将值从"初始值"改为"线程1的值"
boolean success = example.safeUpdate("初始值", "线程1的值");
System.out.println("线程1更新结果: " + (success ? "成功" : "失败"));
});
Thread thread2 = new Thread(() -> {
// 线程2模拟ABA场景:A->B->A
boolean success1 = example.safeUpdate("初始值", "线程2的中间值");
System.out.println("线程2第一次更新结果: " + (success1 ? "成功" : "失败"));
if (success1) {
boolean success2 = example.safeUpdate("线程2的中间值", "初始值");
System.out.println("线程2第二次更新结果: " + (success2 ? "成功" : "失败"));
}
});
// 启动线程2并等待完成,确保ABA场景发生
thread2.start();
thread2.join();
// 启动线程1
thread1.start();
thread1.join();
}
}自旋开销与适应性策略
当多个线程频繁对同一共享变量执行CAS操作时,失败重试会导致大量的CPU循环消耗,这就是自旋开销问题。在高竞争环境下,这种开销可能超过传统锁机制。
解决自旋开销的常见策略包括:
- 指数退避:在每次CAS失败后,线程等待一段时间再重试,等待时间可呈指数增长
- 适应性自旋:JVM根据历史成功率动态调整自旋策略
- 队列化:当检测到高竞争时,将竞争线程排队,避免大量无用的CAS尝试
多变量原子操作限制
标准的CAS操作只能保证单个变量的原子更新。当需要对多个共享变量进行原子更新时,直接的CAS操作无法满足需求。
解决方案包括:
- 封装为对象:将多个变量封装到一个对象中,使用
AtomicReference对整个对象进行CAS操作 - 锁升级:当检测到多变量更新需求时,临时升级为轻量级锁
- 事务内存:使用软件或硬件事务内存(Transactional Memory)支持多变量原子操作
CAS在分布式系统中的应用与挑战
分布式环境下的CAS扩展
在分布式系统中,CAS操作需要扩展为跨多个节点的原子操作。常见的分布式CAS实现方案包括:
- 基于分布式一致性协议:利用Raft、Paxos等分布式一致性算法实现跨节点的CAS语义
- 基于数据库的乐观锁:使用数据库的版本号或时间戳机制实现分布式CAS
- 基于缓存的分布式原子操作:Redis等内存数据库提供了
CAS-like命令(如WATCH/MULTI/EXEC)实现分布式原子操作
以下是基于数据库乐观锁实现分布式CAS的示例:
-- 创建支持乐观锁的表
CREATE TABLE inventory (
id BIGINT PRIMARY KEY,
product_id VARCHAR(50) NOT NULL,
stock INT NOT NULL,
version INT NOT NULL DEFAULT 0, -- 版本号字段
updated_at TIMESTAMP DEFAULT CURRENT_TIMESTAMP
);
-- 基于CAS的库存扣减操作
UPDATE inventory
SET stock = stock - :quantity,
version = version + 1,
updated_at = CURRENT_TIMESTAMP
WHERE product_id = :productId
AND stock >= :quantity
AND version = :expectedVersion; -- CAS条件:版本号必须匹配
-- 检查更新是否成功
SELECT ROW_COUNT(); -- 返回受影响的行数,0表示CAS失败混合锁策略
在实际的分布式系统中,纯粹的CAS方案或传统的锁方案都难以满足所有场景的需求。现代系统通常采用混合锁策略,根据不同场景动态选择最合适的并发控制机制。
例如,某证券交易所系统采用以下混合策略:
- 订单簿管理:使用悲观锁确保买卖订单的原子匹配
- 行情数据更新:采用MVCC(多版本并发控制)实现高并发读取
- 用户资产变更:使用CAS操作实现无锁更新
这种混合策略使系统在百万级并发下保持了较低的延迟,同时确保了数据的一致性。(扩展阅读:MVCC架构演进与创新设计:从并发冲突到多版本管理)
CAS技术的创新应用与未来趋势
硬件加速的CAS操作
随着新型硬件架构的发展,CAS操作正在获得硬件层面的进一步优化:
- 持久内存(PMem)中的原子操作:Intel持久内存支持8字节的原子持久化写入,为CAS操作提供了新的硬件基础
- RDMA网络的原子操作:支持RDMA(远程直接内存访问)的网络设备可以提供跨节点的原子操作,减少分布式CAS的延迟(扩展阅读:RDMA技术深度解析:从基础原理到创新设计与实践)
- GPU并行计算中的原子操作:现代GPU提供了高效的原子操作指令,适用于大规模并行计算场景
无锁数据结构
基于CAS操作,研究人员和工程师开发了各种无锁数据结构,这些结构在高并发环境下提供了比传统锁基数据结构更好的性能:
- 无锁队列:如Michael-Scott队列,支持多生产者多消费者场景
- 无锁哈希表:支持并发插入、查找和删除操作
- 无锁跳表:有序并发数据结构的无锁实现
这些无锁数据结构在并发容器、数据库索引和缓存系统中有着广泛的应用前景。
CAS与人工智能的融合
在人工智能和机器学习领域,CAS操作在参数服务器和分布式训练中扮演着重要角色。例如:
- 模型参数更新:多个训练节点可以同时读取参数,基于CAS机制更新,避免锁竞争
- 梯度累积:使用CAS操作实现梯度的原子累加,确保分布式训练的正确性
某AI训练平台利用CAS操作优化参数更新流程,使模型训练中的参数更新延迟从15ms降至3ms,训练效率提升了3.8倍。
自适应并发控制
未来的并发控制系统可能更加智能化,能够根据实时负载特征动态调整并发控制策略。这种自适应系统可能包含:
- 机器学习预测模型:预测不同数据访问模式下的冲突概率,动态选择锁策略或CAS策略
- 实时监控与调整:监控系统竞争程度,在高竞争时自动从CAS切换到轻量级锁
- 分层并发控制:根据数据的重要性和访问频率,采用不同级别的并发控制机制
架构实践指南
选型决策框架
在选择CAS与传统锁机制时,架构师应考虑以下关键因素:
维度 | 适合CAS的场景 | 适合传统锁的场景 |
|---|---|---|
竞争程度 | 低到中等竞争 | 高竞争 |
操作粒度 | 细粒度操作 | 粗粒度操作或复杂事务 |
延迟要求 | 低延迟需求 | 可接受一定延迟 |
一致性要求 | 最终一致性可接受 | 强一致性必需 |
重试成本 | 重试成本低 | 重试成本高 |
开发复杂性 | 团队熟悉无锁编程 | 团队熟悉传统并发控制 |
性能优化建议
- 减少CAS竞争:通过数据分片、本地副本等技术减少对同一内存位置的并发访问
- 批量CAS操作:将多个CAS操作合并,减少总的重试次数
- 缓存友好设计:确保CAS操作的内存地址具有良好的缓存局部性
- 适时降级:当检测到CAS操作频繁失败时,自动降级为更合适的并发控制机制
监控与调优
- CAS失败率监控:实时监控CAS操作的成功率,及时发现竞争热点
- 自旋开销分析:分析CAS重试导致的CPU消耗,优化重试策略
- ABA问题检测:在开发和测试阶段加入ABA问题的检测机制
结论
CAS操作作为并发控制领域的重要技术,代表了从悲观锁到乐观并发控制的范式转变。通过硬件支持的原子指令,CAS实现了无锁编程的可能性,在高并发场景下提供了比传统锁机制更好的性能表现。
然而,CAS并非万能解决方案。ABA问题、自旋开销和多变量原子操作限制等挑战要求架构师在采用CAS技术时必须谨慎权衡。在分布式系统中,CAS的扩展带来了额外的复杂性,需要结合分布式一致性协议、数据库乐观锁等机制共同实现。
未来,随着持久内存、RDMA网络和AI加速器等新硬件技术的发展,CAS操作将在更多场景中发挥重要作用。同时,自适应并发控制系统的出现将使系统能够根据实际工作负载动态选择最优的并发控制策略,实现性能与一致性的最佳平衡。
对于架构师而言,深入理解CAS技术的原理、适用场景和局限性,结合具体业务需求做出合理的技术选型,是构建高性能、高可用分布式系统的关键能力之一。在日益复杂的并发环境下,掌握从传统锁机制到CAS操作的全套工具箱,将使架构师能够设计出更加优雅、高效的并发控制系统。
本文参与 腾讯云自媒体同步曝光计划,分享自作者个人站点/博客。
原始发表:2026-06-26,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号