Jetson Orin 还在用 DeepStream7?JetPack7.2 解锁DeepStream 8全新能力

Jetson Orin 还在用 DeepStream7?JetPack7.2 解锁DeepStream 8全新能力

GPUS Lady
发布于 2026-07-03 18:19:47
发布于 2026-07-03 18:19:47
还在 Jetson Orin 系列设备上使用 DeepStream 6/7 的开发者一定要看过来。先看看2025年9月推出的 8.0 与 2026年 3 月发表的 9.0 新增的功能,是否能刺激你的升级欲望?
DeepStream 三个版本的特性比较
- 基础软硬件适配总览
对比维度 | DeepStream 7.1(7.x 稳定版) | DeepStream 8.0 | DeepStream 9.0 |
|---|---|---|---|
JetPack/L4T | JP 6.1 / L4T R36.4(Orin 系列) | JP 7.0 GA / L4T R38.2(Orin/Thor) | JP 7.1 / L4T R38.4(Orin/Thor) |
x86 系统 | Ubuntu 22.04 LTS | Ubuntu 22.04 LTS | Ubuntu 24.04 LTS |
CUDA 版本 | CUDA 12.3 | CUDA 13.0 | CUDA 13.1 |
TensorRT | TRT 10.7 / 10.10 | TRT 10.13 | TRT 10.14.1 |
Triton 推理服务器 | x86:24.08 / Jetson:24.08 | x86:25.03 / Jetson:25.08 | x86:26.01 / Jetson:25.08 |
支持 GPU 架构 | T4/Ampere/Ada/Orin | 新增 Blackwell、Jetson Thor | 新增 RTX Pro 4500、GB200/DGX Spark |
TAO 工具链 | TAO 5.x | TAO 6.0 | 兼容 TAO 6.0+,新增 VLM 模型支持 |
废弃组件 | 无核心工具废弃 | Graph Composer 最后支持版本,9.0 彻底移除 | Graph Composer 完全删除,由 Coding Agent 替代 |
- 核心 AI 视觉跟踪能力单视图 3D 跟踪,BEVFusion 传感器融合支持,无原生多相机全局 3D 跟踪能力
功能 | DS 7.1 | DS 8.0 | DS 9.0 |
|---|---|---|---|
3D 跟踪 | 单视图 3D 跟踪,BEVFusion 传感器融合支持 | 新增MV3DT 多视角 3D 跟踪(多相机全局校准、统一 3D 坐标)、Pose Estimation 3D 跟踪 | MV3DT 精度大幅优化;跟踪器支持按类别过滤目标;原生 OBB 旋转包围盒输出 |
实例分割跟踪 | 基础 Mask 支持 | 新增 MaskTracker(SAM2 驱动像素级实例跟踪) | MaskTracker 置信度优化,OSD 支持模糊遮罩(blur-mask)隐私打码 |
ReID 重识别 | 基础行人重识别 | MV3DT 内置跨相机 ReID | 支持自定义 ReID 过滤规则,元数据 OBB 序列化输出 |
生成式视觉 | 无原生 VLM 插件 | 仅基础检测 / 分类 / 分割 | 新增nvvllmvlm插件,原生支持 Cosmos Reason 2 视觉大模型实时推理 |
- 开发框架与 Python 生态
开发能力 | DS 7.1 | DS 8.0 | DS 9.0 |
|---|---|---|---|
Service Maker | Python Alpha 测试版,基础 Pipeline API | Pyservicemaker 正式版,动态流、媒体提取器、录制应用封装完善 | Pyservicemaker 成为官方标准,传统 Python bindings 标记废弃;新增 Smart Recording 封装 |
Inference Builder | 无 | 全新工具:配置文件一键生成多后端推理流水线(TRT/Triton/DS) | 增强,支持 VLM 推理后端配置 |
DeepStream Coding Agent | 无 | 无 | 重磅新增:自然语言生成完整 Pipeline 代码,支持 MCP 开发助手对接 Cursor/Claude |
FlowAPI | 基础测试示例 | test5 完整 FlowAPI 示例 | FlowAPI 全面接管底层插件控制,Agent 原生依赖 FlowAPI |
REST 服务 | 基础管道控制 API | 动态流、推理配置 REST 接口 | 新增健康检查、监控指标 REST 接口;OpenTelemetry/Prometheus 监控导出器原生支持 |
- 流媒体与插件增强
流媒体能力 | DS 7.1 | DS 8.0 | DS 9.0 |
|---|---|---|---|
动态流管理 | 静态多路输入 | nvdsdynamicsrcbin:无需重启解码器增删多路流 | 动态流支持 OBB 元数据透传、批量录制 |
音视频同步 | 基础 RTP 时间戳 | nvdsudpsrc/sink 支持音频帧配置、A/V 精准同步、流冗余备份 | 支持 H.265/AV1 动态码率调节 |
像素格式 | UYVY、Gray16 LE 基础支持 | 高质量像素格式扩展,CUDA OpenCV 硬件加速转换 | 多通道浮点图像 GPU 预处理原生插件 |
开源插件 | 少量基础组件 | 扩充元数据处理插件 | nvdsmetainsert、nvdsmetaextract、nvimageenc 等批量开源 |
从这三个版本的定位上来作区分:
- DeepStream 7.x:
- 定位:传统单相机视觉分析稳定生产版本
- 特性:经典 GStreamer 流水线版——稳定成熟的 nvinfer/nvtracker/nvdsosd 体系,C/C++ 和旧 Python bindings,TAO 模型为主,适合传统视频分析管线;
- DeepStream 8.x:
- 定位:多相机全域视觉的过渡升级版本
- 特性:引入 Service Maker + 动态流管理——推出 pyservicemaker正式版、动态增删流(nvdsdynamicsrcbin)、MV3DT 多视角 3D 跟踪、MaskTracker(SAM2),开始从"纯插件配置"向"可编程 Pipeline"过渡
- DeepStream 9.x:
- 定位:视觉大模型 + 云原生可观测的全新一代平台
- 特特性:AI Agent + 生成式视觉版——传统 Python bindings 移除,全面转向 pyservicemaker+ FlowAPI;新增 Coding Agent(自然语言生成 Pipeline)、VLM 推理插件(Cosmos Reasoner 2 / nvvllmvlm)、Inference Builder 支持 VLM 后端,面向 Agentic Workflow 和多模态推理
简单来说,7.x 是在造发动机,8.x 是在造自动挡汽车,而 9.x 则是直接给你配了一个自动驾驶司机,这样的比喻大家应该就更能感受的不同版本的特性。
透过以上表格可以清晰地看出,DeepStream 8.0 并非一次常规的迭代更新,而是一次具有“跨越”性质的架构升级;随后的 9.0 版本则是在这一坚实基础上进行的深度增强与生态完善。面对如此显著的演进,我们是否有足够的驱动力为现有的 DeepStream 环境进行一次全面升级?如果您认为这次升级带来的价值值得投入,那么请继续往下看。
此前在 Jetson Orin Nano / NX / AGX Orin 系列设备上,即便硬件性能足够,往往也被困在 DeepStream 6.x/7.x——根源在于 JetPack 最高只到 6.1.2(L4T r36.x),无法满足 DeepStream 8.0 对 BSP(L4T r38.x)和底层库版本的最低要求,导致新功能看得见却用不上,这种"被版本卡住"的无力感很多开发者都深有体会。
好消息是,随着 JetPack 7.2(L4T r39.2)正式发布,这道枷锁已经彻底被打破——Jetson Orin 系列不仅可以顺利升级宿主环境,也能将您的 DeepStream 升级到 8.0(甚至 9.x)版本。这意味着你终于可以把原本停留在计划里的 MV3DT 多视角分析、MaskTracker 精细分割,乃至 DeepStream 9 的生成式视觉能力,实实在在地部署到边缘设备上继续验证和迭代。
用SDK Manager 将系统升级到 Jetpack 7.2
要实现版本跨越的首要工作,就是用 NVIDIA SDK Manager 将 Jetson Orin 系列设备的系统升级至 Jetpack 7.2,由于安装过程相当直观,请自行访问 《NVIDIA SDK Manager Documentation》去下载与安装即可,最新版本提供 Linux 与 Windows 的安装包,十分方便。
用 SDKManager 安装 Jetpack 7.2 有三种方式,推荐使用“Direct Flash”(如下图)比较简单:

原本按照过去的惯例,在下面“ADDITIONAL SDKS”选项中会出现"DeepStream”选项,但是在 Orin 系列的 Jetpack 7.2 中没有这个选项,如下图:
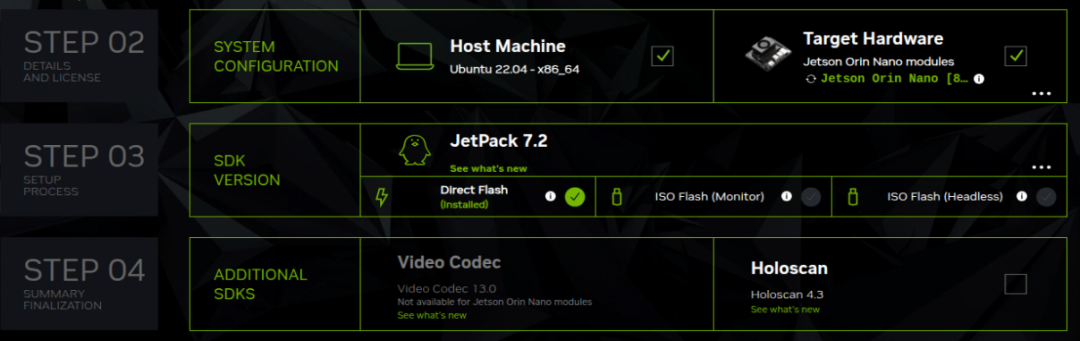
因此我们需要在系统升级完之后,再单独用 DeepStream 8.0 的 .deb 或 .tar 安装,如果要使用 DeepStream 9.x 的话,目前只能透过 Docker 容器的方法进行测试与调试。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-07-01,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号