冰雪奇缘的雪宝,被带到了现实

冰雪奇缘的雪宝,被带到了现实

mixlab
发布于 2026-03-25 08:45:18
发布于 2026-03-25 08:45:18

从银幕走向现实:揭秘“会走路的雪宝”是如何诞生的?
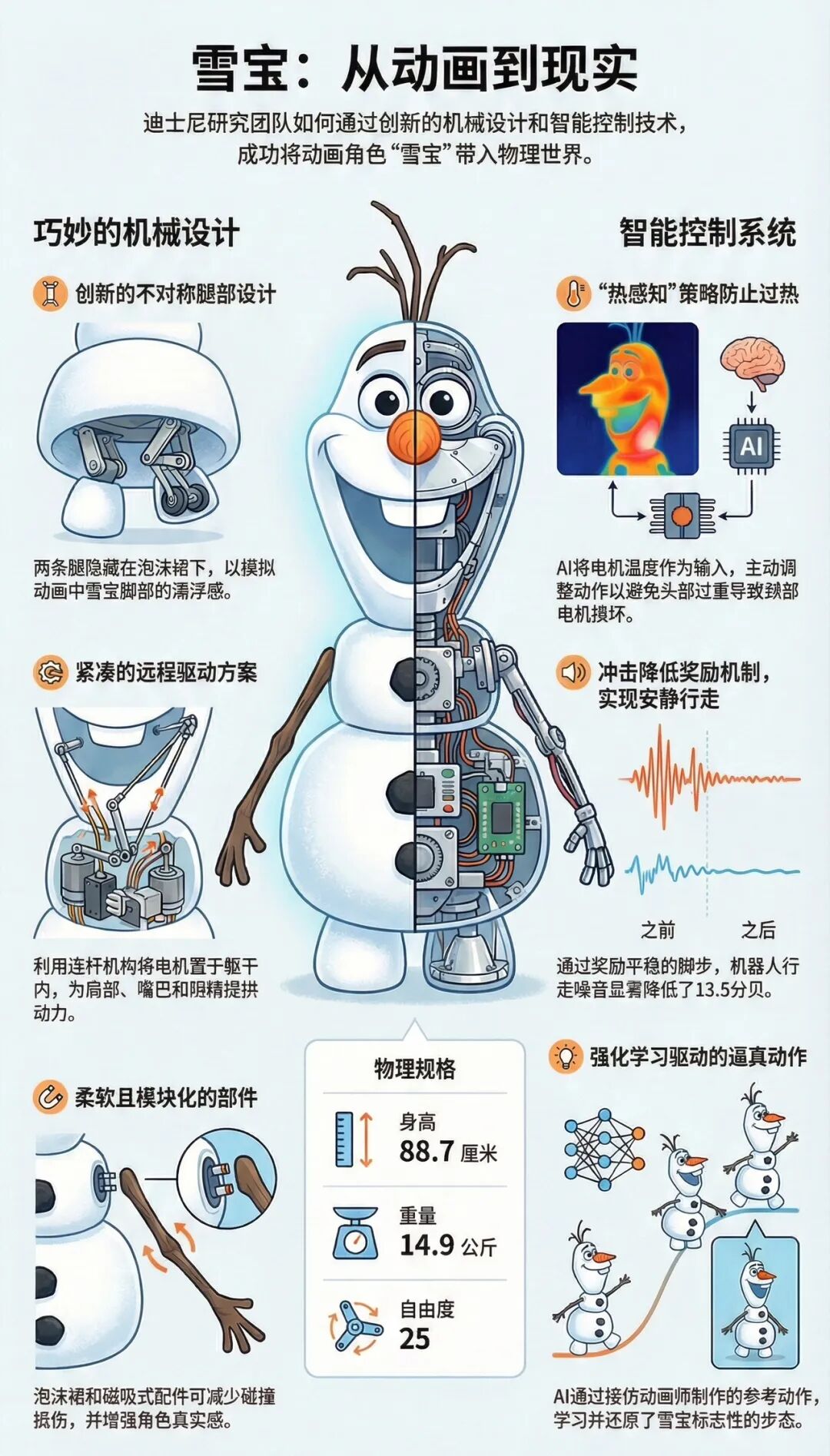
在动画世界里,角色的动作往往不符合物理定律,比例也极其夸张。雪宝就是一个典型的例子:他有一个巨大的脑袋、细长的脖子,以及在身体下方像雪球一样“漂浮”移动的双脚。

将这样一个“反物理”的角色转化为能在现实中自由行走、且让人感到“它活了”的机器人,是机器人学领域的一项巨大挑战。迪士尼研究院(Disney Research Imagineering)的专家们通过创新的机械设计与人工智能算法,成功实现了这一突破。
一、 机械奇迹:隐藏在“雪球”下的奥秘
要让机器人看起来像雪宝,最难的是在狭小的空间里塞进复杂的机械结构,同时还要维持他那标志性的外形。
- “隐身”的双腿:为了模拟动画中雪球滑动的效果,工程师设计了一套非对称的六自由度(6-DoF)腿部机构。这两条腿并没有像传统机器人那样露在外面,而是隐藏在一个由柔软聚氨酯泡沫制成的“裙子”下。这种泡沫既能维持雪球的圆润形状,又具备弹性,允许腿部进行大幅度动作,甚至能吸收跌落时的冲击。
- 精密的联动机构:由于雪宝的躯干空间极其有限,无法在每个关节处直接安装马达。研发团队采用了球面和平面连杆机构,将驱动器安置在空间较宽裕的地方,通过连杆远程驱动手臂、嘴巴和眼睛的动作。
- 磁吸式安全设计:为了增加趣味性并保护硬件,雪宝的手臂、鼻子和头发都通过磁铁连接。这样在发生碰撞或跌落时,这些部件会自动脱落,既降低了损坏风险,又能像电影里一样玩“身体解体”的梗。
二、 智慧大脑:让动作不仅是“走”,更是“表演”
传统的机器人追求的是效率和稳健,但对于雪宝来说,“可信度”(Believability)才是核心 。
- 强化学习(RL)驱动:研发团队并没有使用传统的编程方式,而是利用强化学习,让机器人模仿动画师制作的参考动作。通过这种方式,雪宝学会了标志性的“后跟-脚尖”行走方式,使其看起来更像那个活泼的动画角色,而不是一个生硬的机器。
- 消音技术:机器人的金属脚步声往往会破坏梦幻感。团队在AI训练中加入了一个特殊的撞击减少奖励机制,成功将行走噪音降低了 13.5分贝,实现了近乎安静的漫步。
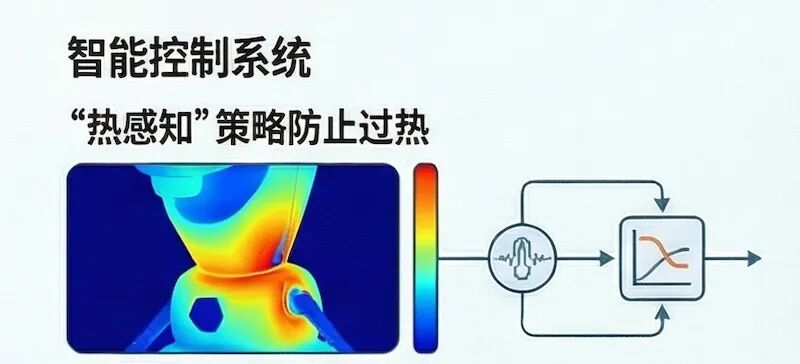
- 温控感知策略:雪宝面临一个尴尬的挑战——“发烧”。他细长的脖子里装载了驱动沉重头部的小型马达,在厚重的服装包裹下散热极其困难。研究人员为此开发了一套热感知策略(Thermal-aware policy),将马达温度实时输入控制系统。当温度接近极限时,AI会自动调整动作节奏或姿态以减小负担,在不停止表演的前提下防止硬件烧毁。
三、 未来趋势:机器人将拥有“表演灵魂”
雪宝机器人的成功预示了机器人学未来的几个关键转变:
- 从“功能性”转向“情感化”:以往机器人主要负责爬山或搬运,未来当它们进入娱乐和陪伴领域时,角色忠实度和审美约束将成为工程设计的新目标。
- 跨领域的技术融合:这次为雪宝开发的热量管理系统和降噪策略,未来可以广泛应用于其他受限空间或需要与人亲密接触的机器人设计中。
- 挑战非传统比例:雪宝证明了,即使是比例极度不平衡的虚拟角色,也能通过先进的控制算法在物理世界中稳定行走,这为未来创造更多形态各异的机器人铺平了道路。
总结与展望
雪宝机器人不仅仅是一个会走的玩具,它是物理世界与数字艺术融合的里程碑。
如果把传统的工业机器人比作精密工作的工人,那么雪宝就像是一位穿着隐形动力装甲的特约演员:它内部所有的复杂机械与精密算法,都是为了让观众在看到它迈出第一步时,能够由衷地相信——那个银幕里的雪人真的“活”过来了。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-12-22,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号