OpenVINO2025 C++部署异常缺陷检测模型

OpenVINO2025 C++部署异常缺陷检测模型

OpenCV学堂
发布于 2026-04-02 20:15:59
发布于 2026-04-02 20:15:59
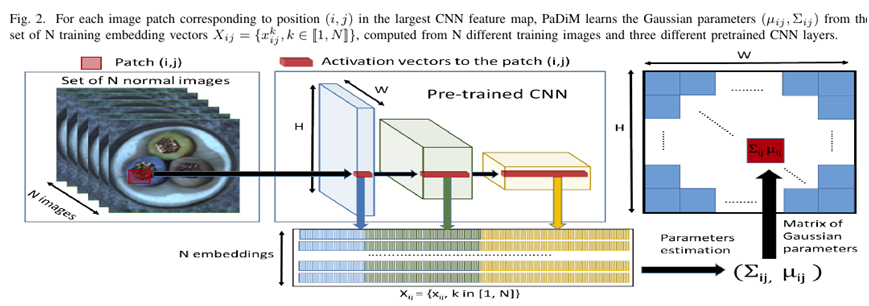
Padim主要是通过CNN网络在一系列正常样本生成特征向量,计算特征向量的多个方差高斯矩阵,获取正常样本的特征数据分布,然后对输入的样本图像,计算它的特征向量与训练生成的特征数据分布之间的马氏距离。从而实现异常检测与定位。
Padim模型训练与导出ONNX格式或者OpenVINO格式支持,请看下面这篇文章。
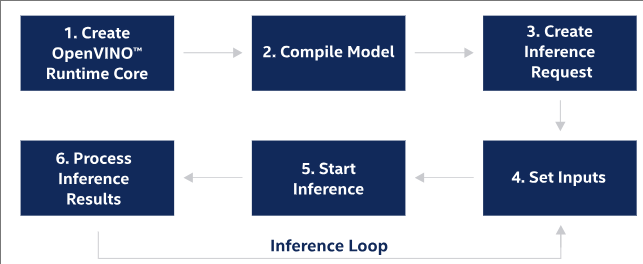
OpenVINO2025推理步骤
OpenVINO2025相比之前版本C++ SDK更加的简洁与易用,同时支持动态修改输入维度参数。
加载模型与创建推理请求
ov::CompiledModel compiled_model = ie.compile_model(onnxpath, "CPU");
this->infer_request = compiled_model.create_infer_request();获取全部输出层名称
auto outputs = compiled_model.outputs();
for (auto item : outputs) {
std::cout << item.get_any_name() << std::endl;
names.push_back(item.get_any_name());
}修改输入层维度信息
ov::Tensor input_tensor = infer_request.get_input_tensor();
auto input_shape = input_tensor.get_shape();
input_shape[0] = 1;
input_shape[1] = 3;
input_shape[2] = input_h;
input_shape[3] = input_w;
input_tensor.set_shape(input_shape);获取输出层维度信息与数据类型
std::cout << "element type: " << output2.get_element_type().to_string() << std::endl;
std::cout << "shape info: " << output2.get_shape().to_string() << std::endl;推理
cv::Mat blob = cv::dnn::blobFromImage(image, 1.0 / 255.0, cv::Size(input_w, input_h), cv::Scalar(), true, false);
memcpy(input_tensor.data<float>(), blob.ptr<float>(), data_s * sizeof(float));
// 推理与返回结果
this->infer_request.infer();获取推理输出数据
this->infer_request.infer();
auto output0 = this->infer_request.get_tensor(names[0]);
const float* score = (float*)output0.data();
std::cout << "anomly score: " << score[0]<< std::endl;
auto output1 = this->infer_request.get_tensor(names[1]);
const int* pred_label = (int*)output1.data();
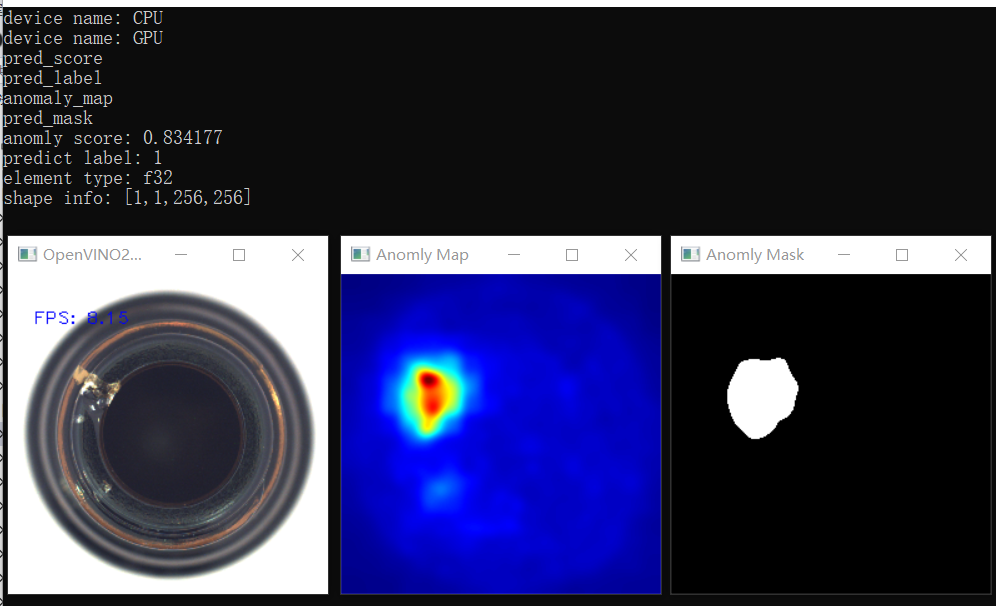
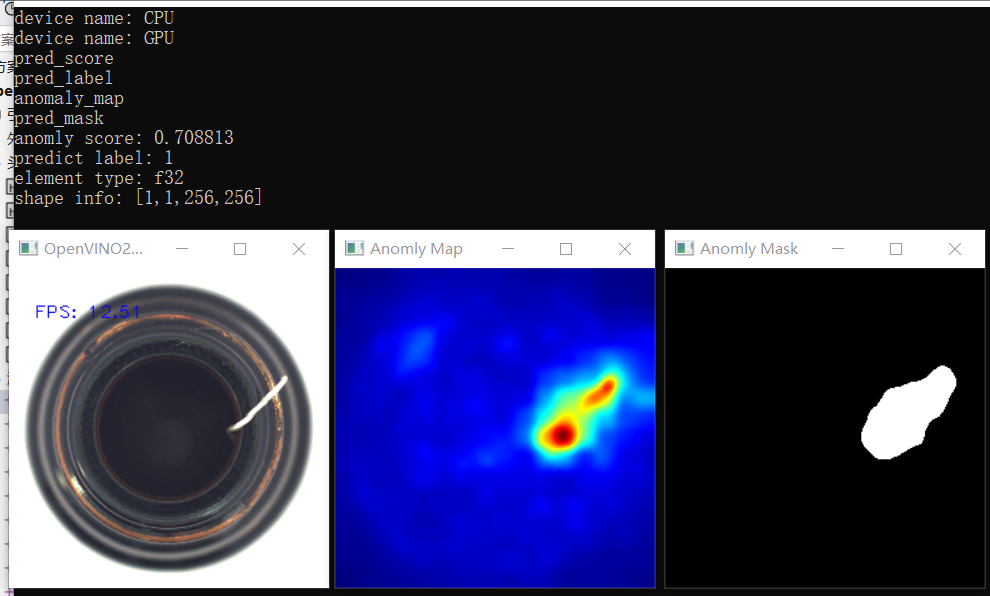
std::cout << "predict label: " << pred_label[0]<< std::endl;代码演示
针对PatchCore、Padim、EfficientAD等异常检测模型,我实现了一个类封装,只要几行代码即可实现异常缺陷检测模型部署,调用代码如下:
std::shared_ptr<PatchCoreDetector> detector(new PatchCoreDetector());
detector->initConfig("D:/python/yolov5-7.0/padim/model.xml", 224, 224);
cv::Mat image = cv::imread("D:/python/yolov5-7.0/breaksmall.png");
detector->detect(image);
cv::imshow("输入图像", image);
cv::waitKey(0);
cv::destroyAllWindows();运行结果如下:
学习OpenVINO2025
大模型部署开发
直接扫码查看
上位机与机器视觉开发者必备技能
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-08-11,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号