雷达系列 | 雷达组网拼图对比教程:PyCWR vs PyCINRAD

雷达系列 | 雷达组网拼图对比教程:PyCWR vs PyCINRAD
用户11172986
发布于 2026-05-07 19:14:13
发布于 2026-05-07 19:14:13
雷达系列 | 雷达组网拼图对比教程:PyCWR vs PyCINRAD
前言
首先祝大家五一快乐!
3月尾起pycwr突然诈尸更新了许多内容,一看版本更新到1.0.8了,更新了组网插值,风场反演,质量控制之类的功能,没咋细看
打赢复活赛难道是要争夺国内第一雷达库的名头吗

之前很多读者询问过如何绘制雷达组网拼图,也就是radar mosaic
巧妇难为无米之炊,没有多部雷达的数据也谈不上做一期教程
刚好metradar开源的同时给了测试数据,那么我们就开始吧
本教程使用 PyCWR 和 PyCINRAD 两个 Python 库,分别对三个台站的雷达数据进行组网拼图,并对比两者的效果与使用方式。
数据说明
数据源自metradar测试文件
三台站观测时间集中在 2020-06-12 05:39 ~ 05:42 UTC,时间差约 3 分钟,满足组网时间一致性要求。
!pip install pycwr --upgrade --index-url https://pypi.mirrors.ustc.edu.cn/simple/
Successfully installed pycwr-1.0.8
!pip install cinrad --user --upgrade --index-url https://pypi.mirrors.ustc.edu.cn/simple/
Successfully installed cinrad-1.9.3
# 基础库导入
import os
import numpy as np
import xarray as xr
import matplotlib.pyplot as plt
import cartopy.crs as ccrs
import cartopy.feature as cfeature
from glob import glob
# 设置字体(避免中文显示为空白)
plt.rcParams['font.sans-serif'] = ['DejaVu Sans']
plt.rcParams['axes.unicode_minus'] = False
# 数据根目录
BASE_DIR = '/home/mw/project'
RADAR_DIRS = [os.path.join(BASE_DIR, s) for s in ['南京', '泰州', '淮安']]
第一部分:PyCWR 雷达组网
PyCWR 提供了高层封装函数 run_radar_network_3d,可以自动完成:
- 从每个雷达目录中挑选最接近目标时次的文件
- 将多部雷达数据插值到统一的经纬度网格
- 合成 3D 组网反射率体
- 生成 CR(组合反射率)、VIL(垂直积分液态水含量)、ET(回波顶高)等产品
- 可选输出为 NetCDF
1.1 运行组网
from pycwr.interp import run_radar_network_3d
# 运行 3D 组网
pycwr_ds = run_radar_network_3d(
target_time='2020-06-12T05:40:00', # 目标时次
radar_dirs=RADAR_DIRS, # 每部雷达的目录列表
lon_min=117.5, # 组网区域西边界
lon_max=121.5, # 组网区域东边界
lat_min=31.0, # 组网区域南边界
lat_max=34.0, # 组网区域北边界
lon_res_deg=0.01, # 经向分辨率(约 1km)
lat_res_deg=0.01, # 纬向分辨率(约 1km)
level_heights=[1000.0, 3000.0, 5000.0], # 垂直层高度(米)
field_names=['dBZ'], # 组网的场名
output_products=['CR', 'VIL', 'ET'], # 附带计算的产品
composite_method='quality_weighted', # 合成方法
max_range_km=460.0, # 最大径向距离
blind_method='hybrid', # 盲区处理方法
parallel=False, # 是否并行(首次建议 False)
)
print('Network complete!')
print(pycwr_ds)
print('\nData vars:', list(pycwr_ds.data_vars))
print('Global attrs:', list(pycwr_ds.attrs.keys()))
Network complete!
<xarray.Dataset> Size: 7MB
Dimensions: (z: 3, lat: 301, lon: 401)
Coordinates:
* z (z) float64 24B 1e+03 3e+03 5e+03
* lat (lat) float64 2kB 31.0 31.01 31.02 ... 33.98 33.99 34.0
* lon (lon) float64 3kB 117.5 117.5 117.5 ... 121.5 121.5 121.5
Data variables:
dBZ (z, lat, lon) float64 3MB nan nan nan nan ... nan nan nan
coverage_count (z, lat, lon) int16 724kB 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0
blind_mask (z, lat, lon) int8 362kB 1 1 1 1 1 1 1 1 ... 1 1 1 1 1 1 1 1
CR (lat, lon) float64 966kB 36.85 35.42 34.16 ... 14.9 16.05
VIL (lat, lon) float64 966kB 0.2651 0.2333 0.1712 ... nan nan
ET (lat, lon) float64 966kB 5e+03 5e+03 5e+03 ... nan nan nan
ET_TOPPED (lat, lon) uint8 121kB 1 1 1 1 1 1 1 0 0 ... 0 0 0 0 0 0 0 0
Attributes: (12/32)
product_type: radar_network_3d
target_time: 2020-06-12T05:40:00
radar_count: 3
radar_files: /home/mw/project/南京/Z_RADR_I_Z9250_20200...
composite_method: quality_weighted
influence_radius_m: 300000.0
... ...
output_products: ["CR", "VIL", "ET"]
coverage_policy: observable_only
product_level_heights: [1000.0, 1500.0, 2000.0, 2500.0, 3000.0,...
plot_style: reference
plot_canvas_px: [920, 790]
plot_files: {}
Data vars: ['dBZ', 'coverage_count', 'blind_mask', 'CR', 'VIL', 'ET', 'ET_TOPPED']
Global attrs: ['product_type', 'target_time', 'radar_count', 'radar_files', 'composite_method', 'influence_radius_m', 'fillvalue', 'projection', 'projection_lon_0', 'projection_lat_0', 'field_range_mode', 'blind_method', 'requested_max_range_km', 'actual_max_range_km_by_field', 'use_qc', 'qc_method', 'qc_clear_air_mode', 'qc_clear_air_max_ref', 'qc_clear_air_max_rhohv', 'qc_clear_air_max_phidp_texture', 'qc_clear_air_max_snr', 'qc_applied_by_radar', 'quality_weight_terms', 'algorithm_references', 'effective_earth_radius', 'network_config_path', 'output_products', 'coverage_policy', 'product_level_heights', 'plot_style', 'plot_canvas_px', 'plot_files']
1.2 查看组网结果
# 查看 CR(组合反射率)
cr_pycwr = pycwr_ds['CR']
print('CR dims:', cr_pycwr.dims)
print('CR valid count:', int((~cr_pycwr.isnull()).sum()), '/', cr_pycwr.size)
print('CR range:', float(cr_pycwr.min().values), '~', float(cr_pycwr.max().values), 'dBZ')
# 查看 VIL 和 ET
if'VIL'in pycwr_ds.data_vars:
vil = pycwr_ds['VIL']
print('VIL range:', float(vil.min().values), '~', float(vil.max().values), 'kg/m2')
if'ET'in pycwr_ds.data_vars:
et = pycwr_ds['ET']
print('ET range:', float(et.min().values), '~', float(et.max().values), 'km')
CR dims: ('lat', 'lon')
CR valid count: 90352 / 120701
CR range: -10.843102995397057 ~ 68.00083265995372 dBZ
VIL range: 0.00918480371962535 ~ 14.410177000336246 kg/m2
ET range: 1000.1081189278914 ~ 5000.0 km
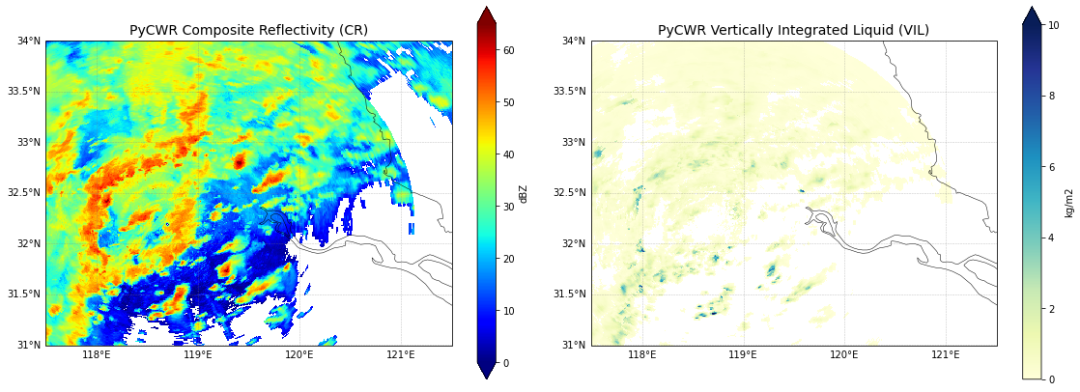
1.3 PyCWR 组网结果绘图
fig, axes = plt.subplots(1, 2, figsize=(16, 7), subplot_kw={'projection': ccrs.PlateCarree()})
# CR 绘图
ax = axes[0]
cr_pycwr.plot(ax=ax, cmap='jet', vmin=0, vmax=65,
cbar_kwargs={'label': 'dBZ', 'shrink': 0.8})
ax.set_title('PyCWR Composite Reflectivity (CR)', fontsize=14)
ax.set_xlabel('Longitude')
ax.set_ylabel('Latitude')
ax.add_feature(cfeature.COASTLINE, linewidth=0.5)
ax.add_feature(cfeature.BORDERS, linewidth=0.5)
gl = ax.gridlines(draw_labels=True, linewidth=0.5, color='gray', alpha=0.5, linestyle='--')
gl.top_labels = False
gl.right_labels = False
# VIL 绘图
if'VIL'in pycwr_ds.data_vars:
ax = axes[1]
pycwr_ds['VIL'].plot(ax=ax, cmap='YlGnBu', vmin=0, vmax=10,
cbar_kwargs={'label': 'kg/m2', 'shrink': 0.8})
ax.set_title('PyCWR Vertically Integrated Liquid (VIL)', fontsize=14)
ax.set_xlabel('Longitude')
ax.set_ylabel('Latitude')
ax.add_feature(cfeature.COASTLINE, linewidth=0.5)
ax.add_feature(cfeature.BORDERS, linewidth=0.5)
gl = ax.gridlines(draw_labels=True, linewidth=0.5, color='gray', alpha=0.5, linestyle='--')
gl.top_labels = False
gl.right_labels = False
plt.tight_layout()
plt.show()
output
output
第二部分:PyCINRAD 雷达组网
PyCINRAD 提供了 cinrad.calc.GridMapper 类,用于将多部雷达的扫描数据合并到统一的笛卡尔网格上。相比 PyCWR 的自动 3D 组网,PyCINRAD 的组网方式更加底层和灵活,需要用户:
- 手动读取每部雷达的数据
- 将极坐标数据转换为笛卡尔坐标(
polar_to_xy) - 使用
GridMapper进行网格合并
2.1 读取单站数据并查看信息
import cinrad
station_names = ['Nanjing', 'Taizhou', "Huai'an"]
station_dirs = ['南京', '泰州', '淮安']
radar_data = {}
for station, sdir in zip(station_names, station_dirs):
f = os.path.join(BASE_DIR, sdir)
files = [os.path.join(f, x) for x in os.listdir(f) if x.endswith('.bz2')]
r = cinrad.io.read_auto(files[0])
radar_data[station] = r
print(f"{station} ({r.code}): lon={r.stationlon:.3f}, lat={r.stationlat:.3f}, "
f"scan_time={r.scantime}, ntilts={r.get_nscans()}")
print('\nData read complete!')
Nanjing (Z9250): lon=118.697, lat=32.191, scan_time=2020-06-12 05:42:29+00:00, ntilts=11
Taizhou (Z9523): lon=119.994, lat=32.558, scan_time=2020-06-12 05:40:32+00:00, ntilts=11
Huai'an (Z9517): lon=118.826, lat=33.243, scan_time=2020-06-12 05:39:20+00:00, ntilts=11
Data read complete!
2.2 单仰角(0.5°)基本反射率拼图
# 读取 0.5° 仰角数据并转为笛卡尔坐标
all_br = []
for station in station_names:
r = radar_data[station]
br = r.get_data(0, 230, 'REF') # 0 = 最低仰角,230km 探测距离
br_xy = cinrad.calc.polar_to_xy(br) # 极坐标 -> 笛卡尔坐标
all_br.append(br_xy)
print(f"{station}: REF shape={br['REF'].shape}, xy grid shape={br_xy['REF'].shape}")
# 使用 GridMapper 拼图
gm_br = cinrad.calc.GridMapper(all_br)
grid_br = gm_br(step=0.01) # 0.01° 网格步长
print('\nMosaic complete!')
print(grid_br)
print(f"Valid count: {int((~grid_br['REF'].isnull()).sum())} / {grid_br['REF'].size}")
Nanjing: REF shape=(366, 920), xy grid shape=(1000, 1000)
Taizhou: REF shape=(366, 230), xy grid shape=(1000, 1000)
Huai'an: REF shape=(366, 230), xy grid shape=(1000, 1000)
Mosaic complete!
<xarray.Dataset> Size: 3MB
Dimensions: (latitude: 521, longitude: 622)
Coordinates:
* latitude (latitude) float64 4kB 30.12 30.13 30.14 ... 35.3 35.31 35.32
* longitude (longitude) float64 5kB 116.2 116.3 116.3 ... 122.4 122.5 122.5
Data variables:
REF (latitude, longitude) float64 3MB nan nan nan nan ... nan nan nan
Attributes:
elevation: 0
range: 230
scan_time: 2020-06-12 05:40:47
site_code: RADMAP
site_name: RADMAP
tangential_reso: nan
task: VCP21D
Valid count: 133452 / 324062
/home/mw/.local/lib/python3.9/site-packages/cinrad/calc.py:477: RuntimeWarning: All-NaN axis encountered
r_data_max = np.nanmax(r_data, axis=0)
2.3 组合反射率(CR)拼图
PyCINRAD 官方计算 CR 的方式是:
rl = list(f.iter_tilt(230, 'REF'))
cr = cinrad.calc.quick_cr(rl)
然而 cinrad.calc.quick_cr 在 v1.9.3 中存在 bug,下面是根因分析。
Bug 源码
quick_cr 被 @require(["REF"]) 装饰。该装饰器的源码(来自 cinrad/calc.py)如下:
def require(var_names: List[str]) -> Callable:
def wrap(func: Callable) -> Callable:
@wraps(func)
def deco(*args, **kwargs) -> Any:
# ... 校验逻辑 ...
return func(*args, **kwargs)
return wrap # <-- BUG!应该是 `return deco`
return wrap
错误所在:wrap 返回了 wrap(自身)而不是 deco。
后果: 装饰后 quick_cr 实际上是内层的 wrap 函数,而不是 deco。因此当你调用:
cr = cinrad.calc.quick_cr(rl)
quick_cr 执行的是 wrap(rl),它运行完校验逻辑后 ... 再次返回 wrap(一个函数对象),而不是返回 func(*args, **kwargs)(真正的 CR Dataset)。
正确的装饰器应该怎么写
def require(var_names: List[str]) -> Callable:
def wrap(func: Callable) -> Callable:
@wraps(func)
def deco(*args, **kwargs) -> Any:
# ... 校验逻辑 ...
return func(*args, **kwargs)
return deco # <-- 正确
return wrap
本 notebook 采用的 workaround
由于上游 bug 在 v1.9.3(最新版)中仍然存在,我们绕过损坏的装饰器直接调用核心逻辑。下面的代码单元定义了 quick_cr_fixed,复现了原版 quick_cr 本应使用的内部算法(grid_2d + np.nanmax)。
from xarray import DataArray, Dataset
from cinrad.grid import grid_2d
# 修复版 quick_cr,绕过 cinrad 1.9.3 的装饰器 bug
def quick_cr_fixed(r_list, resolution=(1000, 1000)):
r_data = []
r, x, y = grid_2d(
r_list[0]["REF"].values,
r_list[0]["longitude"].values,
r_list[0]["latitude"].values,
resolution=resolution,
)
r_data.append(r)
for i in r_list[1:]:
r, x, y = grid_2d(
i["REF"].values,
i["longitude"].values,
i["latitude"].values,
x_out=x,
y_out=y,
resolution=resolution,
)
r_data.append(r)
cr = np.nanmax(r_data, axis=0)
ret = Dataset({"CR": DataArray(cr, coords=[y, x], dims=["latitude", "longitude"])})
ret.attrs = i.attrs
ret.attrs["elevation"] = 0
return ret
all_cr = []
for station in station_names:
r = radar_data[station]
rl = list(r.iter_tilt(230, 'REF'))
cr = quick_cr_fixed(rl)
all_cr.append(cr)
print(f"{station} CR valid pixels: {int((~cr['CR'].isnull()).sum().values)} / {cr['CR'].size}")
# CR 拼图
gm_cr = cinrad.calc.GridMapper(all_cr)
grid_cr = gm_cr(step=0.01)
print('\nCR mosaic complete!')
print(f"Valid count: {int((~grid_cr['CR'].isnull()).sum())} / {grid_cr['CR'].size}")
print(f"Value range: {float(grid_cr['CR'].min().values):.2f} ~ {float(grid_cr['CR'].max().values):.2f} dBZ")
/tmp/ipykernel_268/827592994.py:24: RuntimeWarning: All-NaN axis encountered
cr = np.nanmax(r_data, axis=0)
Nanjing CR valid pixels: 396782 / 1000000
/tmp/ipykernel_268/827592994.py:24: RuntimeWarning: All-NaN axis encountered
cr = np.nanmax(r_data, axis=0)
Taizhou CR valid pixels: 460866 / 1000000
Huai'an CR valid pixels: 447054 / 1000000
CR mosaic complete!
Valid count: 145250 / 324062
Value range: 0.10 ~ 70.25 dBZ
/tmp/ipykernel_268/827592994.py:24: RuntimeWarning: All-NaN axis encountered
cr = np.nanmax(r_data, axis=0)
/home/mw/.local/lib/python3.9/site-packages/cinrad/calc.py:477: RuntimeWarning: All-NaN axis encountered
r_data_max = np.nanmax(r_data, axis=0)
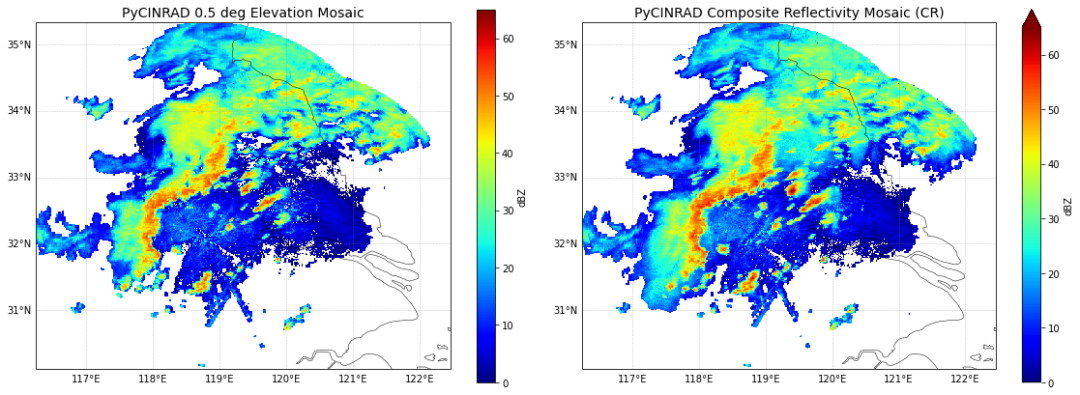
2.4 PyCINRAD 组网结果绘图
fig, axes = plt.subplots(1, 2, figsize=(16, 7), subplot_kw={'projection': ccrs.PlateCarree()})
# 单仰角拼图
ax = axes[0]
grid_br['REF'].plot(ax=ax, cmap='jet', vmin=0, vmax=65,
cbar_kwargs={'label': 'dBZ', 'shrink': 0.8})
ax.set_title('PyCINRAD 0.5 deg Elevation Mosaic', fontsize=14)
ax.set_xlabel('Longitude')
ax.set_ylabel('Latitude')
ax.add_feature(cfeature.COASTLINE, linewidth=0.5)
ax.add_feature(cfeature.BORDERS, linewidth=0.5)
gl = ax.gridlines(draw_labels=True, linewidth=0.5, color='gray', alpha=0.5, linestyle='--')
gl.top_labels = False
gl.right_labels = False
# CR 拼图
ax = axes[1]
grid_cr['CR'].plot(ax=ax, cmap='jet', vmin=0, vmax=65,
cbar_kwargs={'label': 'dBZ', 'shrink': 0.8})
ax.set_title('PyCINRAD Composite Reflectivity Mosaic (CR)', fontsize=14)
ax.set_xlabel('Longitude')
ax.set_ylabel('Latitude')
ax.add_feature(cfeature.COASTLINE, linewidth=0.5)
ax.add_feature(cfeature.BORDERS, linewidth=0.5)
gl = ax.gridlines(draw_labels=True, linewidth=0.5, color='gray', alpha=0.5, linestyle='--')
gl.top_labels = False
gl.right_labels = False
plt.tight_layout()
plt.show()
output
output
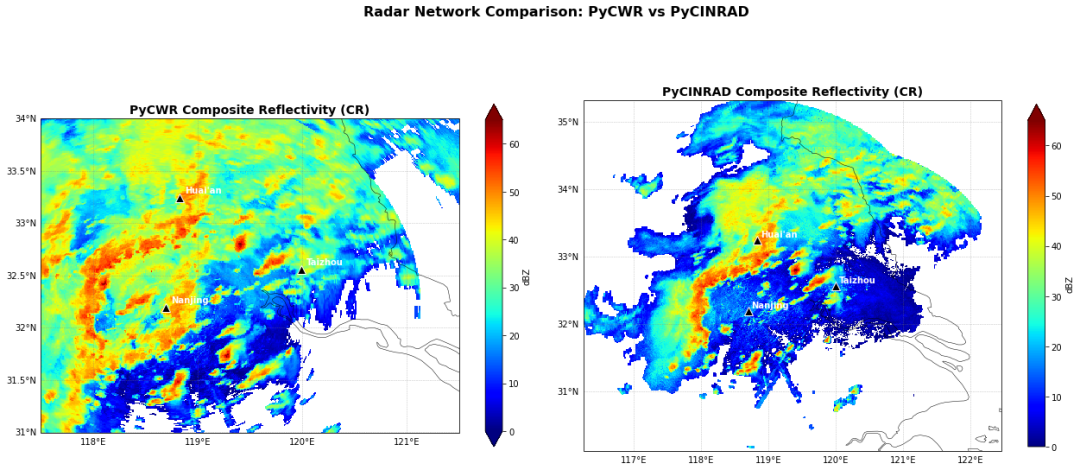
第三部分:效果对比
将 PyCWR 和 PyCINRAD 的 CR 组网结果放在同一张图中进行直观对比。
fig, axes = plt.subplots(1, 2, figsize=(18, 8), subplot_kw={'projection': ccrs.PlateCarree()})
# PyCWR CR
ax = axes[0]
cr_pycwr.plot(ax=ax, cmap='jet', vmin=0, vmax=65,
cbar_kwargs={'label': 'dBZ', 'shrink': 0.75})
ax.set_title('PyCWR Composite Reflectivity (CR)', fontsize=14, fontweight='bold')
ax.set_xlabel('Longitude')
ax.set_ylabel('Latitude')
ax.add_feature(cfeature.COASTLINE, linewidth=0.5)
ax.add_feature(cfeature.BORDERS, linewidth=0.5)
gl = ax.gridlines(draw_labels=True, linewidth=0.5, color='gray', alpha=0.5, linestyle='--')
gl.top_labels = False
gl.right_labels = False
# PyCINRAD CR
ax = axes[1]
grid_cr['CR'].plot(ax=ax, cmap='jet', vmin=0, vmax=65,
cbar_kwargs={'label': 'dBZ', 'shrink': 0.75})
ax.set_title('PyCINRAD Composite Reflectivity (CR)', fontsize=14, fontweight='bold')
ax.set_xlabel('Longitude')
ax.set_ylabel('Latitude')
ax.add_feature(cfeature.COASTLINE, linewidth=0.5)
ax.add_feature(cfeature.BORDERS, linewidth=0.5)
gl = ax.gridlines(draw_labels=True, linewidth=0.5, color='gray', alpha=0.5, linestyle='--')
gl.top_labels = False
gl.right_labels = False
plt.suptitle('Radar Network Comparison: PyCWR vs PyCINRAD', fontsize=16, fontweight='bold', y=1.02)
plt.tight_layout()
plt.show()
output
output
3.1 统计对比
def stats(da, name):
vals = da.values.flatten()
vals = vals[~np.isnan(vals)]
print(f"{name}:")
print(f" Valid pixels: {len(vals)} / {da.size}")
print(f" Min: {vals.min():.2f} dBZ")
print(f" Max: {vals.max():.2f} dBZ")
print(f" Mean: {vals.mean():.2f} dBZ")
print(f" Median: {np.median(vals):.2f} dBZ")
print(f" Std: {vals.std():.2f} dBZ")
print()
stats(cr_pycwr, 'PyCWR CR')
stats(grid_cr['CR'], 'PyCINRAD CR')
# 提取重叠区域进行对比
lon_slice = slice(grid_cr.longitude.min().values, grid_cr.longitude.max().values)
lat_slice = slice(grid_cr.latitude.min().values, grid_cr.latitude.max().values)
cr_pycwr_cropped = cr_pycwr.sel(lon=lon_slice, lat=lat_slice)
# 统一坐标名称后插值
cr_pycwr_cropped = cr_pycwr_cropped.rename({'lon': 'longitude', 'lat': 'latitude'})
cr_pycwr_interp = cr_pycwr_cropped.interp(
longitude=grid_cr.longitude.values,
latitude=grid_cr.latitude.values,
method='linear'
)
diff = cr_pycwr_interp - grid_cr['CR']
diff_vals = diff.values.flatten()
diff_vals = diff_vals[~np.isnan(diff_vals)]
print('Overlap difference stats (PyCWR - PyCINRAD):')
print(f" Valid pixels: {len(diff_vals)}")
print(f" Mean diff: {diff_vals.mean():.2f} dBZ")
print(f" Diff std: {diff_vals.std():.2f} dBZ")
print(f" Max positive diff: {diff_vals.max():.2f} dBZ")
print(f" Max negative diff: {diff_vals.min():.2f} dBZ")
PyCWR CR:
Valid pixels: 90352 / 120701
Min: -10.84 dBZ
Max: 68.00 dBZ
Mean: 29.23 dBZ
Median: 30.85 dBZ
Std: 12.29 dBZ
PyCINRAD CR:
Valid pixels: 145250 / 324062
Min: 0.10 dBZ
Max: 70.25 dBZ
Mean: 21.30 dBZ
Median: 20.53 dBZ
Std: 13.12 dBZ
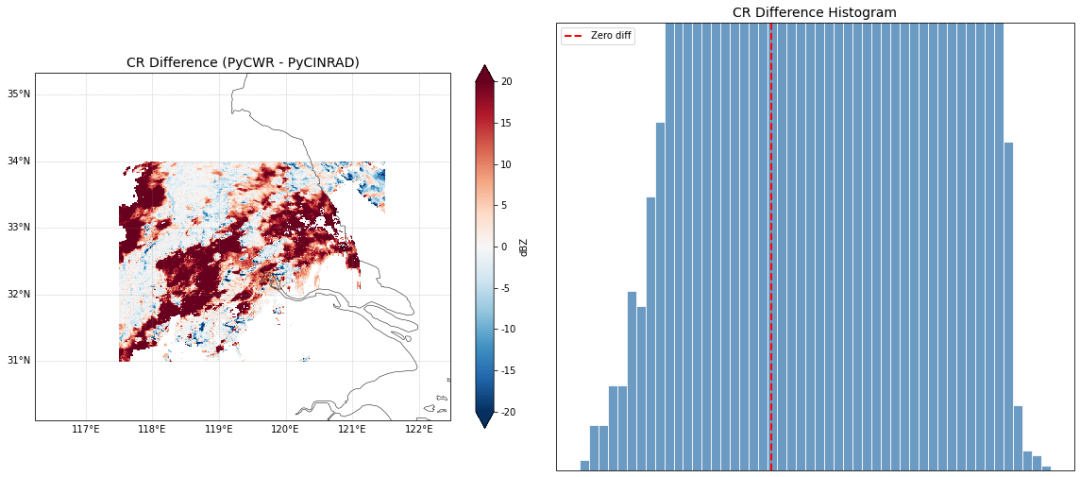
Overlap difference stats (PyCWR - PyCINRAD):
Valid pixels: 79944
Mean diff: 8.27 dBZ
Diff std: 12.58 dBZ
Max positive diff: 56.21 dBZ
Max negative diff: -38.59 dBZ
3.2 差异分布图
fig, axes = plt.subplots(1, 2, figsize=(16, 7), subplot_kw={'projection': ccrs.PlateCarree()})
# 差异图
ax = axes[0]
diff.plot(ax=ax, cmap='RdBu_r', vmin=-20, vmax=20,
cbar_kwargs={'label': 'dBZ', 'shrink': 0.8})
ax.set_title('CR Difference (PyCWR - PyCINRAD)', fontsize=14)
ax.set_xlabel('Longitude')
ax.set_ylabel('Latitude')
ax.add_feature(cfeature.COASTLINE, linewidth=0.5)
ax.add_feature(cfeature.BORDERS, linewidth=0.5)
gl = ax.gridlines(draw_labels=True, linewidth=0.5, color='gray', alpha=0.5, linestyle='--')
gl.top_labels = False
gl.right_labels = False
# 差异直方图
ax = axes[1]
ax.hist(diff_vals, bins=50, color='steelblue', edgecolor='white', alpha=0.8)
ax.axvline(0, color='red', linestyle='--', linewidth=2, label='Zero diff')
ax.set_xlabel('Difference (dBZ)', fontsize=12)
ax.set_ylabel('Count', fontsize=12)
ax.set_title('CR Difference Histogram', fontsize=14)
ax.legend()
ax.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
output
output
第四部分:方法对比总结
对比维度 | PyCWR | PyCINRAD |
|---|---|---|
使用难度 | 高封装,一行代码完成组网 | 低封装,需手动处理每部雷达 |
3D 组网 | 原生支持,可生成 3D 反射率体 | 主要支持 2D 拼图 |
产品生成 | 内置 CR、VIL、ET 等产品 | quick_cr 等函数当前版本有 bug,需手动实现 |
自动选时 | 按 target_time 自动匹配最近文件 | 需手动指定文件 |
网格插值 | 内置 3D 插值到统一经纬度网格 | 使用 polar_to_xy + GridMapper |
质量控制 | 支持 use_qc=True 自动 QC | 需手动处理 |
输出格式 | 支持 NetCDF 输出 | 需手动调用 xarray 输出 |
灵活性 | 较低,按固定流程执行 | 较高,可自定义每一步 |
性能 | 支持 parallel=True 并行 | 单线程,数据量小时足够 |
差异来源分析
- 插值算法不同:PyCWR 使用 3D 体积插值,PyCINRAD 使用 2D 平面插值(
polar_to_xy后GridMapper合并),导致格点值存在差异。 - 网格范围不同:PyCWR 的网格由用户指定 (
lon_min/max,lat_min/max),PyCINRAD 的网格由雷达覆盖范围自动确定,两者覆盖区域不完全一致。 - CR 计算方式不同:PyCWR 在 3D 体积上取各高度层最大值后投影到地面;PyCINRAD 示例中是在 2D 网格上逐层插值后取最大,插值顺序的差异会导致结果不同。
- 盲区/范围处理:PyCWR 有
blind_method和composite_method参数控制盲区与合成策略,PyCINRAD 的GridMapper使用简单的最近邻/最大值合并。
使用建议
- 快速业务化组网:推荐 PyCWR,配置简单,产品齐全,适合批量生产。
- 科研定制分析:推荐 PyCINRAD,每一步可控,便于针对特定算法进行改进和验证。
- 两个库可以互补使用:用 PyCINRAD 读取和预处理单站数据,用 PyCWR 做高层组网产品生成。
附录:保存结果到 NetCDF
# 保存 PyCWR 结果
pycwr_ds.to_netcdf(os.path.join(BASE_DIR, 'pycwr_network_result.nc'))
print('PyCWR result saved: pycwr_network_result.nc')
# 保存 PyCINRAD CR 结果
grid_cr.to_netcdf(os.path.join(BASE_DIR, 'pycinrad_network_cr.nc'))
print('PyCINRAD CR result saved: pycinrad_network_cr.nc')
# 验证读取
ds_check = xr.open_dataset(os.path.join(BASE_DIR, 'pycinrad_network_cr.nc'))
print('\nVerify PyCINRAD result:')
print(ds_check)
PyCWR result saved: pycwr_network_result.nc
PyCINRAD CR result saved: pycinrad_network_cr.nc
Verify PyCINRAD result:
<xarray.Dataset>
Dimensions: (latitude: 521, longitude: 622)
Coordinates:
* latitude (latitude) float64 30.12 30.13 30.14 30.15 ... 35.3 35.31 35.32
* longitude (longitude) float64 116.2 116.3 116.3 116.3 ... 122.4 122.5 122.5
Data variables:
CR (latitude, longitude) float64 ...
Attributes:
elevation: 0
range: 230
scan_time: 2020-06-12 05:40:47
site_code: RADMAP
site_name: RADMAP
tangential_reso: nan
task: VCP21D
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-04-30,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号