雷达系列 | Py-ART 多雷达组网实战(grid_from_radars)

雷达系列 | Py-ART 多雷达组网实战(grid_from_radars)
用户11172986
发布于 2026-05-13 17:26:49
发布于 2026-05-13 17:26:49
雷达系列 | Py-ART 多雷达组网实战(grid_from_radars)
上周朋友丢过来三部菲律宾雷达的 CAPPI 文件,问能不能拼成一张完整的回波图。单部雷达半径只有几百公里,覆盖不全。这种事 Py-ART 一行命令就能搞定,但参数要怎么配、网格范围设多大才不至于一片空白,背后还是有些细节值得说一说。
本篇是雷达系列教程的 Py-ART 分篇,专注 pyart.map.grid_from_radars() 这一条链路。wradlib 那条更灵活的链路放在另一份单独的教程里,两份内容相互独立,可分开学习。
本教材基于 Py-ART 2.2.0 版本,早期版本中 grid_from_radars 的参数命名(如 roi_func 与 weighting_function)存在差异,遇到报错先确认版本号。
阅读路径
- 数据介绍
- 读取多部雷达
- GateFilter 数据质控
- grid_from_radars 网格化组网
- Cartopy 出版级绘图
- 完整代码与附录
!pip install arm-pyart --upgrade -i https://pypi.mirrors.ustc.edu.cn/simple/
1. 数据介绍
本教程使用 3 部菲律宾地区的雷达 CAPPI 数据,文件格式为 CF/Radial NetCDF。
雷达站 | 文件名 | 纬度 | 经度 | 数据形状 (azimuth, range) |
|---|---|---|---|---|
SBAG (Baguio) | 20251103051105_SBAG_CAPPI_2km.nc | 16.356°N | 120.559°E | (360, 480) |
SBAL (Baler) | 20251103051001_SBAL_CAPPI_2km.nc | 15.749°N | 121.632°E | (360, 480) |
SDAET (Daet) | 20251103051038_SDAET_CAPPI_2km.nc | 14.129°N | 122.983°E | (360, 960) |
CAPPI(Constant Altitude Plan Position Indicator)即等高度位显示产品,本数据为 2 km 高度的 CAPPI 反射率因子。
数据中的反射率场名称为 Reflectivity_CAPPI_2km,单位 dBZ。三部雷达分布在吕宋岛北、中、南三处,覆盖范围互有重叠,正好适合演示组网。
# 导入常用库
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.colors as mcolors
import pyart
import cmaps
import warnings
warnings.filterwarnings('ignore')
import cartopy.crs as ccrs
import cartopy.feature as cfeature
from mpl_toolkits.axes_grid1.inset_locator import inset_axes
file_baguio = '20251103051105_SBAG_CAPPI_2km.nc'
file_baler = '20251103051001_SBAL_CAPPI_2km.nc'
file_daet = '20251103051038_SDAET_CAPPI_2km.nc'
print('依赖检测完成')
2. Py-ART 组网
Py-ART(Python ARM Radar Toolkit)是 ARM 计划维护的雷达数据处理工具包,其中 pyart.map.grid_from_radars() 函数把多部雷达数据直接插值到统一的笛卡尔网格上,一步完成组网。整体流程拆成读数据、做质控、跑网格化、出图四个动作。
2.1 读取多部雷达数据
用 pyart.io.read_cfradial 直接读 CF/Radial 格式的 NetCDF。读完后得到三个 pyart.core.Radar 对象,里面是按极坐标存储的扫描数据。
# 使用 pyart.io.read_cfradial 读取 CF/Radial 格式的 NetCDF 文件
radar_baguio = pyart.io.read_cfradial(file_baguio)
radar_baler = pyart.io.read_cfradial(file_baler)
radar_daet = pyart.io.read_cfradial(file_daet)
# 查看雷达基本信息
for name, radar in [('SBAG', radar_baguio), ('SBAL', radar_baler), ('SDAET', radar_daet)]:
print(f'雷达站, {name}')
print(f' 字段, {list(radar.fields.keys())}')
print(f' 位置, ({radar.latitude["data"][0]:.3f} N, {radar.longitude["data"][0]:.3f} E)')
print(f' 数据形状, {radar.fields["Reflectivity_CAPPI_2km"]["data"].shape}')
print()
2.2 数据质控(GateFilter)
组网前先做一遍质控,剔除两类东西。一类是扫描过渡区(transition)也就是天线在仰角切换瞬间采到的奇怪数据,另一类是明显异常的超高值,比如某些原始文件里会出现 Reflectivity > 200 dBZ 的填充值。Py-ART 的 GateFilter 把这两类直接打成 mask,后续插值时自动忽略。
实际工作里要不要应用质控,看个人偏好。原始数据本身已经比较干净时,可以先不传 gatefilter 看一眼组网效果,再决定要不要加。
def make_gatefilter(radar):
"""创建门控过滤器,排除过渡扫描和异常高值。"""
gf = pyart.filters.GateFilter(radar)
gf.exclude_transition() # 排除扫描过渡区
gf.exclude_above('Reflectivity_CAPPI_2km', 100) # 排除超过 100 dBZ 的异常值
return gf
# 分别为三部雷达创建过滤器
gatefilter_baguio = make_gatefilter(radar_baguio)
gatefilter_baler = make_gatefilter(radar_baler)
gatefilter_daet = make_gatefilter(radar_daet)
print('GateFilter 创建完成')
2.3 网格化与组网(grid_from_radars)
pyart.map.grid_from_radars() 是 Py-ART 组网的核心函数,主要参数列在下面这张表里。
参数 | 说明 |
|---|---|
grid_shape | 网格形状 (z, y, x),本例只组网 2 km 高度,z 维度取 1 |
grid_limits | 网格范围 ((z_min, z_max), (y_min, y_max), (x_min, x_max)),单位米,以雷达阵列中心为原点 |
fields | 需要插值的字段列表 |
weighting_function | 权重函数,'barnes2' 表示 Barnes 二阶权重 |
gridding_algo | 网格化算法,'map_gates_to_grid' 把雷达门直接映射到网格 |
roi_func | 影响半径函数,'dist_beam' 根据波束距离自动计算 |
gatefilters | 门控过滤器元组(可选),用于数据质控 |
注意,
grid_shape中的 y/x 维度越大,分辨率越高,但计算时间也越长。做演示用 300×300 即可,做正式产品再上 800×800。
# 执行网格化组网
grid = pyart.map.grid_from_radars(
(radar_daet, radar_baguio, radar_baler), # 多部雷达元组
# gatefilters=(gatefilter_daet, gatefilter_baguio, gatefilter_baler), # 可选,应用质控
grid_shape=(1, 300, 300), # (z, y, x) 网格尺寸
grid_limits=((0, 2000), # 垂直方向 0~2000 m
(-2000000.0, 2000000.0), # 南北方向 ±2000 km
(-1000000.0, 1000000.0)), # 东西方向 ±1000 km
fields=['Reflectivity_CAPPI_2km'], # 反射率场
weighting_function='barnes2', # Barnes2 权重函数
gridding_algo='map_gates_to_grid', # 网格映射算法
roi_func='dist_beam', # 距离波束影响半径
)
print('组网完成')
print(f'网格字段, {list(grid.fields.keys())}')
print(f'网格形状, {grid.fields["Reflectivity_CAPPI_2km"]["data"].shape}')
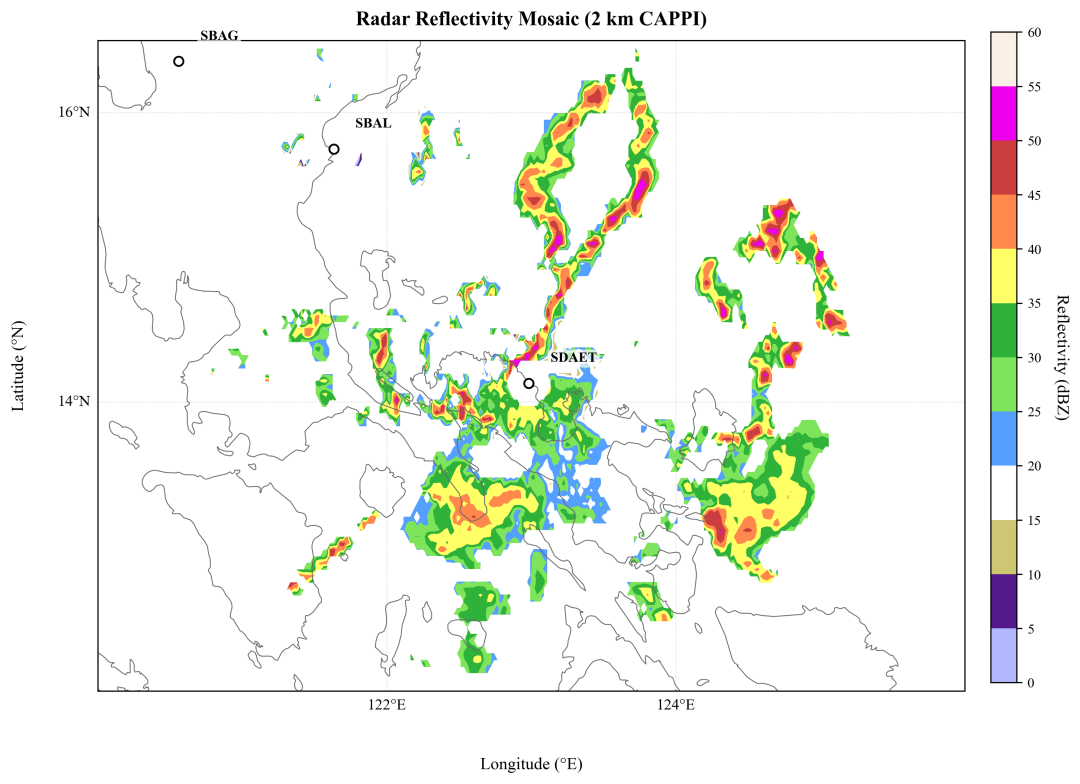
2.4 提取并绘制组网结果(Cartopy)
组网完成后,从 Grid 对象里取出第 0 层(也就是 2 km CAPPI 这一层)的反射率,和对应的经纬度二维数组。Py-ART 的 Grid 已经内置了 point_latitude / point_longitude,不需要自己做坐标转换。
# 从 Grid 对象中提取经纬度和反射率数据
refl = grid.fields['Reflectivity_CAPPI_2km']['data'][0] # 取第 0 层(2 km 高度)
lats = grid.point_latitude['data'][0]
lons = grid.point_longitude['data'][0]
print(f'反射率范围, {np.nanmin(refl):.2f} ~ {np.nanmax(refl):.2f} dBZ')
print(f'纬度范围, {lats.min():.2f} ~ {lats.max():.2f}')
print(f'经度范围, {lons.min():.2f} ~ {lons.max():.2f}')
# 使用 Cartopy 绘制组网反射率图(出版级质量)
cmap = cmaps.radar_1
level = [0, 5, 10, 15, 20, 25, 30, 35, 40, 45, 50, 55, 60]
# 设置出版级字体
plt.rcParams['font.family'] = 'serif'
plt.rcParams['font.serif'] = ['Times New Roman', 'DejaVu Serif']
plt.rcParams['mathtext.fontset'] = 'stix'
plt.rcParams['font.size'] = 11
plt.rcParams['axes.labelsize'] = 12
plt.rcParams['axes.titlesize'] = 13
plt.rcParams['xtick.labelsize'] = 10
plt.rcParams['ytick.labelsize'] = 10
proj = ccrs.PlateCarree()
fig = plt.figure(figsize=(10, 8), dpi=300)
ax = plt.axes(projection=proj)
ax.set_extent([120, 126, 12, 16.5], crs=proj)
# 绘制反射率填色
mesh = ax.contourf(
lons, lats, refl,
transform=proj,
cmap=cmap,
levels=level,
)
# 海岸线
ax.coastlines(resolution='10m', linewidth=0.6, color='dimgray')
# 网格线,淡化处理
gl = ax.gridlines(
draw_labels=True,
linewidth=0.3,
color='gray',
alpha=0.4,
linestyle='--',
xlocs=range(116, 129, 2),
ylocs=range(12, 21, 2),
)
gl.top_labels = False
gl.right_labels = False
gl.xlabel_style = {'size': 10, 'color': 'black'}
gl.ylabel_style = {'size': 10, 'color': 'black'}
# 雷达站位置,空心圆 + 白色描边,避免遮挡数据
radar_coords = {
'SBAG': (float(radar_baguio.latitude['data']), float(radar_baguio.longitude['data'])),
'SBAL': (float(radar_baler.latitude['data']), float(radar_baler.longitude['data'])),
'SDAET': (float(radar_daet.latitude['data']), float(radar_daet.longitude['data'])),
}
for name, (lat, lon) in radar_coords.items():
ax.plot(lon, lat, marker='o', markersize=6, color='black',
markerfacecolor='white', markeredgewidth=1.2, transform=proj, zorder=10)
ax.text(lon + 0.15, lat + 0.15, name, fontsize=9, color='black',
fontweight='bold', transform=proj,
bbox=dict(boxstyle='round,pad=0.2', facecolor='white', alpha=0.7, edgecolor='none'))
# 标题
ax.set_title('Radar Reflectivity Mosaic (2 km CAPPI)', fontsize=13, fontweight='bold', pad=10)
ax.text(0.5, -0.12, 'Longitude (E)', transform=ax.transAxes, ha='center', fontsize=11)
ax.text(-0.1, 0.5, 'Latitude (N)', transform=ax.transAxes, va='center', rotation='vertical', fontsize=11)
# 色条,放在图右侧,使用 inset_axes
cax = inset_axes(ax, width='3%', height='100%', loc='lower left',
bbox_to_anchor=(1.02, 0, 1, 1), bbox_transform=ax.transAxes)
cbar = plt.colorbar(mesh, cax=cax, ticks=level)
cbar.set_label('Reflectivity (dBZ)', fontsize=11, rotation=270, labelpad=18)
cbar.ax.tick_params(labelsize=9)
# 精确调整边距
fig.subplots_adjust(left=0.1, right=0.88, bottom=0.08, top=0.92)
plt.savefig('radar_mosaic_pyart_cartopy.png', dpi=300, bbox_inches='tight', pad_inches=0.1)
plt.show()
print('图片已保存, radar_mosaic_pyart_cartopy.png (300 dpi)')
image
image
3. 完整代码
上面的演示用了 300×300 的网格,分辨率够看效果但还是糙了点。下面这段是把 grid_shape 提到 800×800、并把绘图扩到吕宋岛全岛范围的版本,可直接复制运行。
# =====================================================
# Py-ART 雷达组网完整代码(Cartopy 出版级版本)
# =====================================================
import matplotlib.pyplot as plt
import matplotlib.colors as mcolors
import numpy as np
import cartopy.crs as ccrs
from mpl_toolkits.axes_grid1.inset_locator import inset_axes
import pyart
import cmaps
# 1. 读取雷达数据
radar_baguio = pyart.io.read_cfradial('20251103051105_SBAG_CAPPI_2km.nc')
radar_baler = pyart.io.read_cfradial('20251103051001_SBAL_CAPPI_2km.nc')
radar_daet = pyart.io.read_cfradial('20251103051038_SDAET_CAPPI_2km.nc')
# 2. 创建 GateFilter(可选)
def make_filter(radar):
gf = pyart.filters.GateFilter(radar)
gf.exclude_transition()
gf.exclude_above('Reflectivity_CAPPI_2km', 100)
return gf
# 3. 网格化组网
grid = pyart.map.grid_from_radars(
(radar_daet, radar_baguio, radar_baler),
grid_shape=(1, 800, 800),
grid_limits=((0, 2000), (-2000000, 2000000), (-1000000, 1000000)),
fields=['Reflectivity_CAPPI_2km'],
weighting_function='barnes2',
gridding_algo='map_gates_to_grid',
roi_func='dist_beam',
)
# 4. 提取数据
refl = grid.fields['Reflectivity_CAPPI_2km']['data'][0]
lats = grid.point_latitude['data'][0]
lons = grid.point_longitude['data'][0]
# 5. 使用 Cartopy 绘图(出版级)
plt.rcParams['font.family'] = 'serif'
plt.rcParams['font.serif'] = ['Times New Roman', 'DejaVu Serif']
plt.rcParams['mathtext.fontset'] = 'stix'
plt.rcParams['font.size'] = 11
cmap = cmaps.radar_1
bounds = [0, 5, 10, 15, 20, 25, 30, 35, 40, 45, 50, 55, 60]
norm = mcolors.BoundaryNorm(bounds, cmap.N, extend='both')
proj = ccrs.PlateCarree()
fig = plt.figure(figsize=(10, 8), dpi=300)
ax = plt.axes(projection=proj)
ax.set_extent([116, 128, 12, 20], crs=proj)
mesh = ax.pcolormesh(lons, lats, refl, transform=proj, cmap=cmap, norm=norm, shading='auto')
ax.coastlines(resolution='10m', linewidth=0.6, color='dimgray')
gl = ax.gridlines(
draw_labels=True, linewidth=0.3, color='gray', alpha=0.4, linestyle='--',
xlocs=range(116, 129, 2), ylocs=range(12, 21, 2),
)
gl.top_labels = False
gl.right_labels = False
gl.xlabel_style = {'size': 10}
gl.ylabel_style = {'size': 10}
for name, radar in [('SBAG', radar_baguio), ('SBAL', radar_baler), ('SDAET', radar_daet)]:
lat = float(radar.latitude['data'])
lon = float(radar.longitude['data'])
ax.plot(lon, lat, marker='o', markersize=6, color='black',
markerfacecolor='white', markeredgewidth=1.2, transform=proj, zorder=10)
ax.text(lon + 0.15, lat + 0.15, name, fontsize=9, fontweight='bold', transform=proj,
bbox=dict(boxstyle='round,pad=0.2', facecolor='white', alpha=0.7, edgecolor='none'))
ax.set_title('Radar Reflectivity Mosaic (2 km CAPPI)', fontsize=13, fontweight='bold', pad=10)
ax.text(0.5, -0.12, 'Longitude (E)', transform=ax.transAxes, ha='center', fontsize=11)
ax.text(-0.1, 0.5, 'Latitude (N)', transform=ax.transAxes, va='center', rotation='vertical', fontsize=11)
cax = inset_axes(ax, width='2.5%', height='100%', loc='lower left',
bbox_to_anchor=(1.02, 0, 1, 1), bbox_transform=ax.transAxes)
cbar = plt.colorbar(mesh, cax=cax, ticks=bounds)
cbar.set_label('Reflectivity (dBZ)', fontsize=11, rotation=270, labelpad=18)
cbar.ax.tick_params(labelsize=9)
fig.subplots_adjust(left=0.1, right=0.88, bottom=0.08, top=0.92)
plt.savefig('radar_mosaic_pyart_cartopy.png', dpi=300, bbox_inches='tight', pad_inches=0.1)
plt.show()
附录,常见问题
Q1,组网结果出现大片空白区域
先检查 grid_limits 是否覆盖了所有雷达的探测范围。雷达阵列中心是参考原点,三部雷达的相对位置如果偏到一边,默认 ±1000 km 的范围可能正好把某部雷达切到边缘。
另外 grid_shape 不宜过小,500 km 范围内 100×100 的网格分辨率太低,插值结果会出现明显的网格化条纹。
Q2,如何提高计算速度
三个方向。一是把 grid_shape 从 800×800 降到 400×400,本身就是 4 倍速度的差距;二是 roi_func 用 'constant' 代替 'dist_beam',省掉每个网格点的距离计算;三是上 Dask 并行。
from dask.distributed import Client, LocalCluster
cluster = LocalCluster()
client = Client(cluster)
Q3,Py-ART 适合中国雷达数据吗
中国新一代天气雷达(CINRAD)数据通常是 SA/SB/CB 格式的二进制文件,Py-ART 原生不支持。可以先用 pycwr 或 pycinrad 读取 + 转格式(如 CF/Radial 或 ODIM_H5),再交给 Py-ART 处理。这条链路目前是国内最常见的方案。
参考资料
- Py-ART 官方文档, https://arm-doe.github.io/pyart/
grid_from_radarsAPI, https://arm-doe.github.io/pyart/API/generated/pyart.map.grid_from_radars.html
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-05-09,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号