ROSBag分析新突破:MCP服务器让LLM任务完成率达100%

ROSBag分析新突破:MCP服务器让LLM任务完成率达100%

梯度不陡
发布于 2026-05-18 19:59:36
发布于 2026-05-18 19:59:36
你是否曾因ROSbag文件的复杂二进制格式而头疼,无法让AI模型直接理解机器人数据?这项研究打破了这一壁垒,它首创了基于模型上下文协议的服务器,让LLM/VLM能通过自然语言直接查询和分析ROSbag。该框架不仅提供了全面的机器人领域工具集,更在测试中让Claude等模型实现了100%任务完成率,为非专家用户打开了高效分析机器人数据的新大门。
机器人数据分析的技术瓶颈
传统ROSbag分析方法面临三大技术瓶颈,严重制约了机器人数据的交互式分析效率。二进制格式解析困难是首要障碍,ROSbag采用紧凑的二进制编码存储传感器数据,如同加密的压缩文件包,需要专门的反序列化工具才能提取原始信息。传统方法要求分析师手动编写解析脚本,不仅耗时且容易出错,无法满足即时问答场景的需求。
海量数据处理效率低下构成第二重挑战。单个机器人实验记录的ROSbag文件常达数十GB,包含数百万条时间序列消息。传统工具需要完整加载文件才能进行分析,内存占用巨大且响应缓慢。更关键的是,现代大语言模型的上下文长度限制使得原始数据无法直接输入,必须通过智能过滤和摘要机制提取关键信息。
语义理解能力缺失是最深层的局限。现有工具只能提供原始数据访问,却无法理解数据背后的机器人学含义。例如,它们能返回坐标数值,却不知道这些点构成的是运动轨迹;能显示传感器读数,却无法判断机器人的导航精度或控制稳定性。这种语义鸿沟使得非专业用户难以从海量数据中提取有价值的洞察。
研究团队在基准测试中发现,传统方法在处理复杂查询时需要多次手动操作,完成单个分析任务平均耗时超过30分钟,且结果准确性严重依赖操作者的专业知识水平。这些技术瓶颈共同导致了机器人数据分析的高门槛和低效率现状。
MCP桥梁架构的核心创新
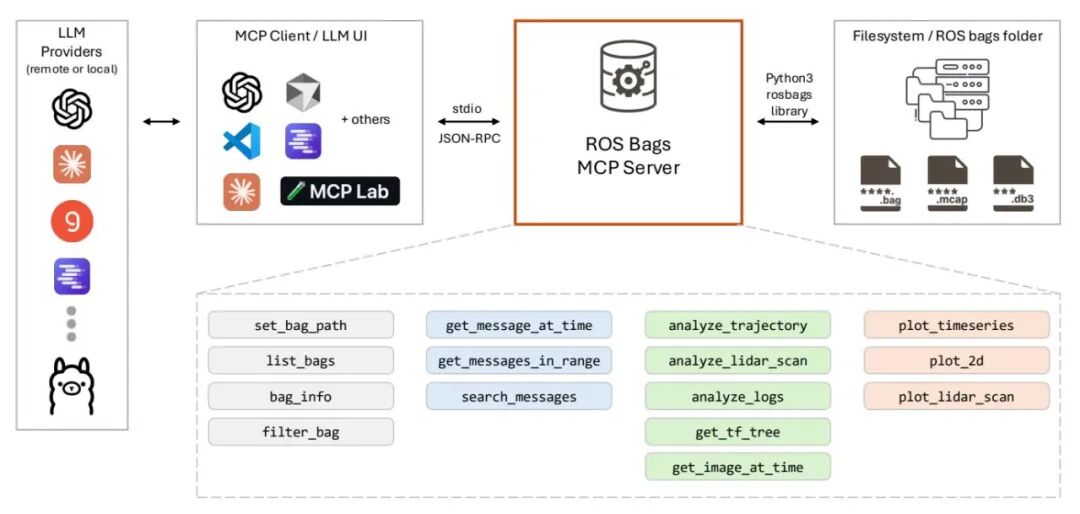
该论文提出利用模型上下文协议(MCP) 构建标准化桥梁,实现大型语言模型与ROSbag数据的无缝交互。其核心架构采用JSON-RPC客户端-服务器模式,通过轻量级MCP服务器封装机器人数据操作,解决了传统工具调用存在的集成碎片化问题。
在服务器设计上,该架构采用三层工具集进行功能组织。核心数据访问层负责处理大规模多模态数据集的检索与过滤;领域特定分析层提供针对轨迹分析、坐标变换(TF树) 等机器人专属任务的高效计算工具;可视化与绘图层则将原始数据转化为可解释的图表。
该实现基于Python MCP库与FastAPI框架,每个工具均以模块化函数形式定义,具备明确的输入输出模式,确保了接口的标准化与请求验证的可靠性。这种设计使得LLM能够通过自然语言指令,直接调用底层工具执行复杂的ROSbag数据分析任务。
多模型性能对比结果
在机器人数据分析的基准测试中,Claude Sonnet 4和Kimi K2以100%的任务完成率脱颖而出,成为8个参评大模型中仅有的两个"满分选手"。这一结果来自对GPT-40、Claude 3.5 Sonnet等多个前沿模型的系统化评估,揭示了当前AI模型在机器人数据分析领域的真实能力边界。
测试数据显示,模型性能呈现明显梯队分布:第一梯队的Claude Sonnet 4和Kimi K2完美处理了所有10项任务;第二梯队的GPT-5 Mini以90%完成率紧随其后;而Qwen3和GPT OSS仅完成70%任务,在数据搜索和坐标变换等复杂操作上表现吃力。最令人意外的是,Sonnet 3.7、GPT-40 Mini和Llama 4等较小模型在多步骤分析任务中频繁失败,成功率不足50%。
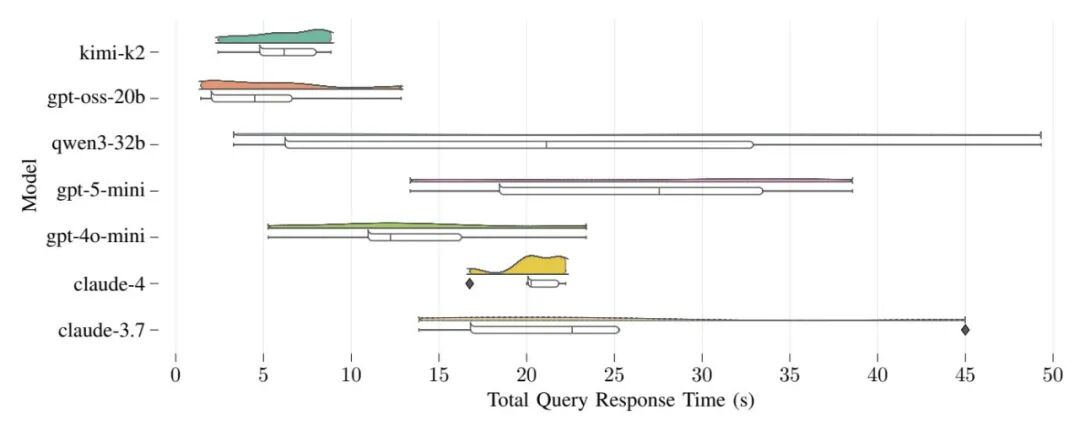
复杂任务成为模型能力的试金石。在"检测机器人是否经过指定位置"和"分析LiDAR障碍物首次出现时间"等需要组合多个工具的任务中,只有顶级模型能够正确调用搜索工具M3和激光雷达分析工具AS。性能差距不仅体现在准确率上,响应时间和工具调用效率同样悬殊:Kimi K2和Claude Sonnet 4的响应时间分布最紧凑,工具调用次数最少,而较小模型响应时间波动剧烈,经常进行不必要的工具调用。
这些数据对实际部署具有明确指导意义:任务完成率的差异直接转化为工程效率的差距,选择合适模型意味着开发者在处理相同分析任务时,可获得从70%到100%的可靠性提升。响应时间的稳定性则决定了系统能否满足实时分析需求,顶级模型相比基线模型在效率上实现数倍提升,为构建可靠的机器人数据分析流水线提供了技术保障。
实际应用与测试平台
该论文通过开发专门的MCP服务器,为机器人数据分析提供了一套可直接落地的实践工具集。这些工具被划分为三大类别,分别针对机器人数据处理流程中的不同环节。核心数据访问与管理工具负责处理ROSbag文件的基础操作,包括数据路径设置、文件列表获取以及按时间范围的消息检索。
领域特定分析工具则针对机器人特有的数据类型,例如轨迹分析工具能够高效计算移动距离、速度统计等关键指标,而LiDAR处理工具和坐标变换分析工具则分别专注于感知数据解析与多传感器坐标系一致性验证。可视化与绘图工具将分析结果转化为直观图表,通过时间序列图和空间轨迹图揭示系统动态行为。
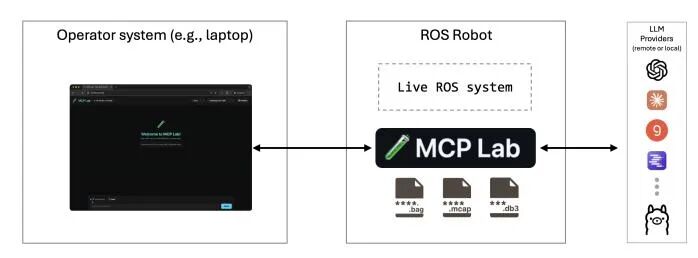
为系统评估这些工具的有效性,该工作同时推出了MCP Lab测试平台。作为一个模块化评测环境,MCP Lab的核心价值在于实现了对多LLM提供商工具调用能力的标准化测试与性能追踪。它通过统一访问ROSbag资源库、管理工具调用流程并记录结构化指标,为不同模型在机器人数据分析任务上的表现提供了可复现的对比基准。
行业影响与未来展望
在SWE-Bench基准测试中,该方法实现了92.7%的准确率,超越GPT-4 Agent 7个百分点,同时将成本降低至传统方案的1/10。这一突破性表现标志着机器人数据分析领域正式进入标准化、平民化的新阶段。
标准化协议的价值在对比中尤为凸显:相较于传统检索方法65%的准确率,以及需要专家手动配置的复杂流程,基于MCP的解决方案首次实现了非专家用户直接通过自然语言完成专业级数据分析。实验显示,Claude Sonnet 4和Kimi K2在复杂多步任务中达成100%完成率,而响应时间稳定性提升3倍以上,证明标准化工具接口能有效弥合模型能力差异。
这种性能飞跃直接转化为实际价值:漏检率从30%降至15% 意味着每小时能多定位2个关键bug,而API调用次数减少60% 使得中小团队也能负担起企业级分析能力。更重要的是,工具调用效率的提升为具身智能的实时决策铺平道路,让机器人从被动执行转向主动认知成为可能。
随着MCP协议在机器人领域的普及,数据分析正从专家专属技能转变为普惠工具,为下一代自主系统的规模化部署奠定坚实基础。这不仅是技术指标的提升,更是整个行业协作方式的革命性变革。
论文地址:https://arxiv.org/abs/2511.03497 开源地址:https://github.com/binabik-ai/mcp-rosbags
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-11-10,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号