同样是以太网,为何在数据中心、汽车、机器人里长成了三种模样

同样是以太网,为何在数据中心、汽车、机器人里长成了三种模样

霞姐聊IT
发布于 2026-05-26 20:05:02
发布于 2026-05-26 20:05:02
很多技术人员都有这样的认知误区:
以太网(Ethernet)是一种标准的通信技术,那么无论它应用于哪个行业,技术体系应该没有大的差异。
但如果真正深入进去就会发现,以太网虽然是世界上最统一的技术标准之一,但各行业的它们还是有很大差异的。
虽然底层是同源的,但为了适应不同行业对带宽、时延、确定性、可靠性、抗干扰、安全性的不同需求,以太网在各行业逐渐演化出了不同的形态。
今天,霞姐就带大家看看:
同样是以太网,为何会在数据中心、汽车、机器人里,长成三种不同的模样。
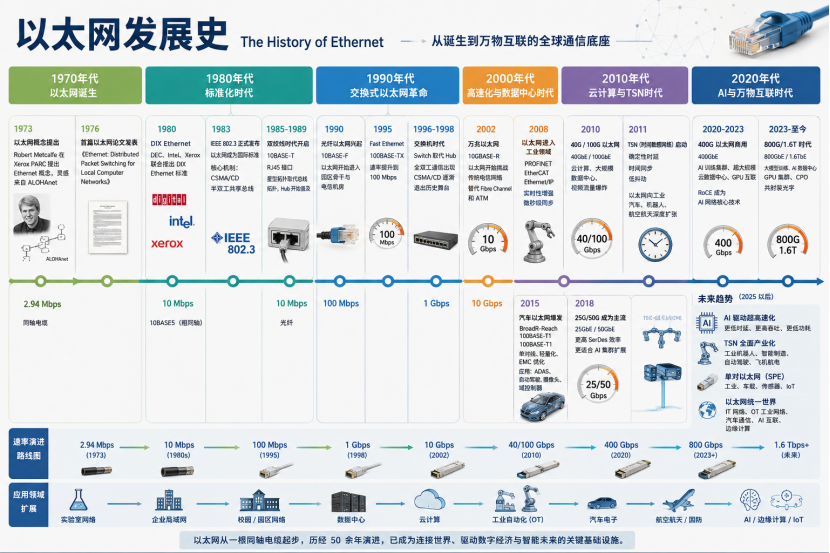
一、以太网简史
以太网虽然诞生已久、但它的生命力却一直很强大。
1973年,它诞生于Xerox PARC研究机构,最初速率仅有2.94Mbps,只用于实验室内计算机之间的通信。
经过了十年的发展,以太网于1983年被纳入IEEE 802.3标准体系,正式成为全球统一局域网技术。
随后,双绞线、RJ45接口以及交换机的普及,让以太网迅速流行起来,登上了全球互联技术的核心舞台。
此后数十年间,以太网速率持续提升,从最初的2.94Mbps,逐步演化至10Mbps、100Mbps、1Gbps、100Gbps,乃至今天的800Gbps与1.6Tbps。
同时,以太网的兼容性极强,因此几乎每一次升级都不会造成生态的断裂,用户、厂商的前期投入能够持续被复用,足够平滑,因此以太网最终成为了数据中心基础设施互联的绝对主流。
另外,以太网从不排斥新技术。它允许各行业在统一底层之上进行定制化扩展与演化,支撑不同领域对实时性、可靠性、同步性与低时延的不同需求。
所以,以太网早已“破圈”,从传统IT网络,拓展到了工业自动化、航空航天、智能汽车、机器人、AI算力网络等领域。
二、数据中心/智算中心中的以太网
数据中心是以太网最早规模化应用、也是最核心的应用领域。
数据中心中有非常多的、不同厂商的设备,以太网的高度标准化、开放兼容的特性非常适合设备之间的互联通信。
同时数据中心也是以太网升级的推动器,一般企业办公等使用场景并不需要很高的通信速率,但数据中心中则存在巨量的数据流动,存在海量的数据交换与东西向流量,比如大规模云计算、分布式存储访问、AI训练的GPU集群通信等,这些推动着以太网从从1G、10G、40G、100G,逐步演进至400G、800G,
乃至今天正在发展的1.6T互联。
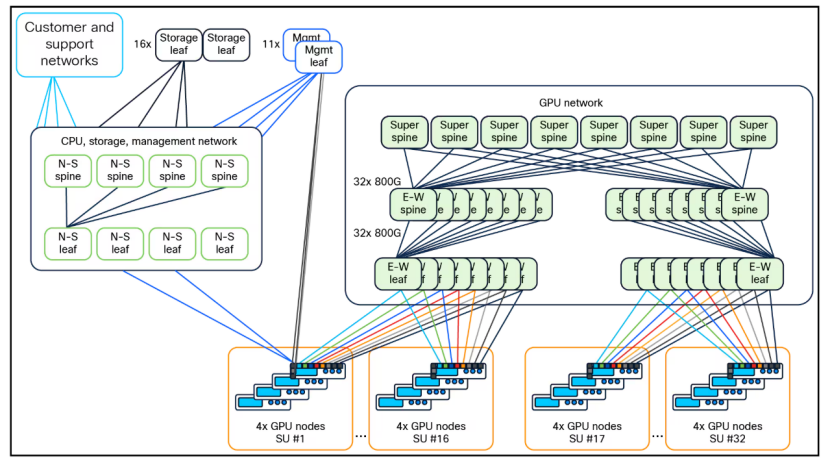
1.组网拓扑
以思科官网提供的,用于AI训练的模块化超大规模网络为例。
以太网主要被应用于三个网络平面:
(1)高性能后端网络
此网络平面承载GPU间通信产生的东西向流量,对网络的要求是:极高带宽、超低延迟和无损传输。
网络关键技术有:
① RoCEv2:
承载RDMA流量。这样数据能绕过CPU和OS内核,在GPU内存间直接交换,实现实现微秒级端到端网络时延。
② 无损传输技术:
RoCEv2对丢包极为敏感,因此通常依赖无损以太网环境。
交换机可以集成DCB(数据中心桥接)中的PFC(优先级流控)技术,当接收端缓冲区紧张时,PFC会发出暂停帧,防止数据包丢失。
③ 智能拥塞控制:
交换机通过ECN对拥塞进行标记,网卡侧则通过DCQCN算法动态调节发送速率:
ECN(显式拥塞通知)在设备上标记拥塞,网卡收到标记后,通过DCQCN(数据中心量化拥塞通知)算法智能降速,提前化解拥塞。
(2)前端与存储网络
① 前端网络:
CPU与外部的通信网络,基于标准的TCP/IP,用于用户连接、数据上传、管理。
② 存储网络:
通常采用比前端网络更高带宽的端口,利用NVMe-oF等技术为GPU节点提供高速存储访问,保障数据能快速加载到GPU内存。
(3)管理网络
管理网络是独立物理网络,用于带外管理。所有管理接口(BMC等)和交换机管理口都接入此网络。
2.以太网的物理形态
在承载关键业务的400G/800G网络中,主要采用:直连铜缆(DAC/ACC/AEC) 和光缆(AOC/光模块+光纤)的物理形态。
铜缆和光缆各有优缺点,一般可根据通信距离、速率等场景加以选择。
铜缆成本低,但粗重硬,且在800G以上,有效距离急剧缩减。一般仅用于机柜内部或相邻机柜的互联。
光缆成本高,约为铜缆的数倍。但,细轻柔,抗干扰能力强,能承载高速率、高距离的通信。
而双绞线则退至承载管理网络通信,而不参与业务。

3.以太网技术栈
那么,要进行数据中心/智算中心的以太网运维开发,需要掌握哪些技术栈呢?
(1)协议层
①DCB:数据中心桥接标准套件
DCB是一套IEEE标准套件,其核心作用是将以太网改造为无损传输网络。
DCB改造和准备好底层无损传输网络后,RoCE可作为高性能负载在其上运行。
DCB套件中的标准有:
DCBX | IEEE 802.1Qaz | 用于交换机与网卡之间协商和交换配置信息,确保两端在无损模式上达成一致 |
|---|---|---|
PFC | IEEE 802.1Qbb | 可按优先级暂停流量,当缓冲区接近饱和时向上游发送Pause帧,防止丢包 |
ETS | IEEE 802.1Qaz | 在不同优先级队列间分配带宽,保障关键业务QoS |
②RoCEv2
RoCEv2将RDMA封装在UDP/IP中,整个协议栈由R-NIC硬件实现,CPU全程不参与数据拷贝。
RoCEv2基于UDP/IP封装RDMA流量,避免了传统TCP协议栈带来的较高软件开销,可靠性与重传等机制主要由RDMA网卡和RoCE协议栈处理。
需要注意的是,大模型训练呈现两种典型模式:参数面AllReduce产生数百MB的“大象流”,要求带宽打满;流水线并行产生KB级的“微突发”,要求延迟可预测。RoCEv2必须同时解决这两类流量的矛盾。
③DCQCN(Data Center Quantized Congestion Notification)
DCQCN是专门为数据中心RDMA网络设计的端到端拥塞控制协议,设计目标是在RoCEv2网络中高效管理拥塞,保证高吞吐、低延迟和零丢包。它有四个步骤:
A.拥塞检测与标记(交换机侧):
监控出口队列深度,超阈值时以一定概率标记IP头中的ECN字段为“拥塞遭遇”(CE)
B.拥塞通知(接收方→发送方):
接收方网卡立即生成CNP包(约64字节)返回发送方
C.速率调节(发送方侧):
收到CNP后先大幅降速,无拥塞后缓慢增速,动态适配网络状态
D.闭环反馈:
形成“降-增”的循环,平滑适应网络负载变化
④Ultra Ethernet
Ultra Ethernet旨在构建面向AI训练的新一代Ethernet Fabric,以进一步缩小乃至替代InfiniBand在AI集群中的优势地位。通过AI拥塞控制、AI流量调度、GPU同步优化和更低长尾时延等改进,构建AI Native Ethernet。
(2)OS技术栈
①OFED(OpenFabrics Enterprise Distribution)
OFED是Linux系统中使用RDMA技术的标准软件栈,由驱动、用户空间库libibverbs/librdmacm、诊断工具ibv_devinfo/ibdiagnet/ibstat等组成。
②DPDK(Data Plane Development Kit)
DPDK允许在用户空间直接处理网络数据包,绕过内核协议栈,进一步降低延迟。在智算中心中,常与RoCE结合使用,通过内核旁路将数据包处理从内核转移至用户空间。
③NCCL等GPU通信库
这是AI训练中实际调用RoCE网络的上层库。一般会封装了AllReduce、AllGather等集合操作,底层通过RDMA verbs实现GPU间直接通信。
(3)调试运维工具栈
①ethtool
ethtool是Linux下配置网卡参数的基础工具,可用于:
查看PFC优先级流控计数器(Xon/Xoff帧收发数量)
调整RX/TX ring buffer大小(ethtool -G eth0 rx 8192 tx 8192)
配置中断合并、流控开关等参数
②perf / bpftrace——深度性能分析
可抓取具体内核函数耗时、网卡驱动内部的性能瓶颈分析,适用于疑难杂症的深度排查
③Tcpdump和RDMA专用抓包工具
④Wireshark图形化协议分析工具
根据实际情况,还需要掌握厂商提供的工具对网络情况进行监控管理。
三、汽车中的以太网
1.应用简史
2008年,BMW率先将以太网规模化引入量产汽车:宝马7系用其进行OBD诊断数据快速刷写、X5将其用于环视系统中的视频流传输。
2011年开始,业界成立OPEN联盟,推动车载以太网技术的标准化。
2016年IEEE正式发布了首个车载专用以太网标准100BASE-T1,速率达100Mbps,其后又陆续发布了更高速率的千兆标准1000BASE-T1和满足低速传感器需求的10BASE-T1S标准。
标准 | 速率 | 典型应用 |
|---|---|---|
100BASE-T1 | 100 Mbps | 环视摄像头、诊断 |
1000BASE-T1 | 1 Gbps | 域控制器间骨干、高分辨率摄像头 |
10BASE-T1S | 10 Mbps | 低速传感器、边缘节点 |
现在,以太网在汽车行业已经非常普及了,主流汽车制造商均已在新车型中部署车载以太网。
2.汽车为何要采用以太网
有以下三点重要原因:
(1)为了实现更高级别的安全和自动驾驶,现在连普通家用汽车的摄像头、雷达等传感器数量都大幅增长到了数十个,甚至上百个。
而传统车载总线(如LIN、CAN、FlexRay)带宽有限,其中LIN仅为几十Kbps,CAN通常为1Mbps级别,即使FlexRay也仅约10Mbps,已经难以承载现代汽车摄像头、雷达等传感器产生的海量数据。
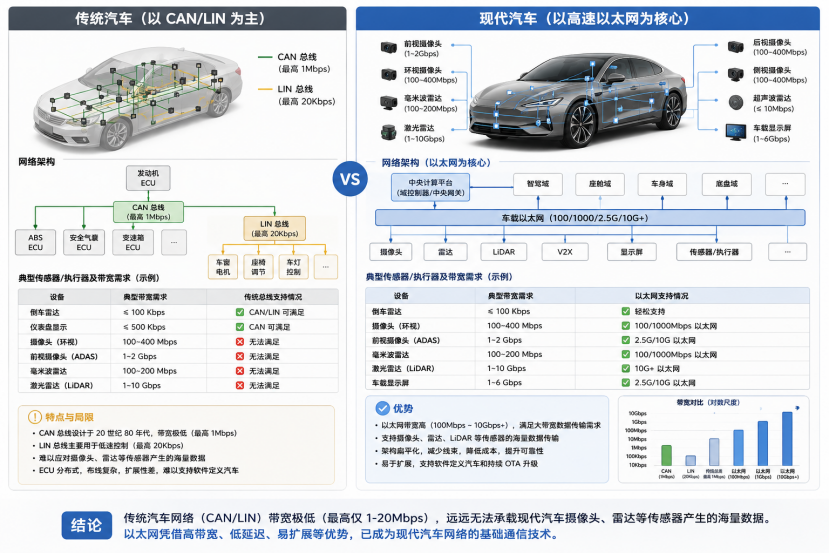
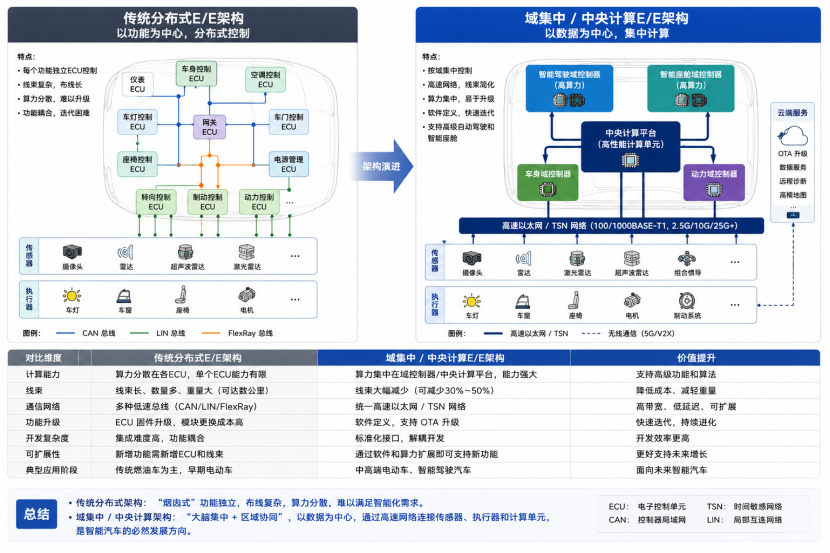
(2)成本、体验等种种原因,使得汽车电子电气架构从分布式架构进化到了域集中/中央计算的架构。
这个架构需要极高的内部带宽和极低的通信延迟,这正是以太网的特长。
(3)基于成熟的以太网,能方便实现OTA(Over-the-Air)升级和DoIP(基于IP的诊断)等特性,这恰是汽车出厂后能持续提升体验的关键特性。
并可无缝连接外部网络(云端、5G/V2X),并为为车云协同、V2X与软件定义汽车奠定基础。
3.汽车的以太网的特点
与追求800G/1.6T、极致吞吐的数据中心不同,车载以太网更关注确定性时延、环境可靠性、轻量化成本。
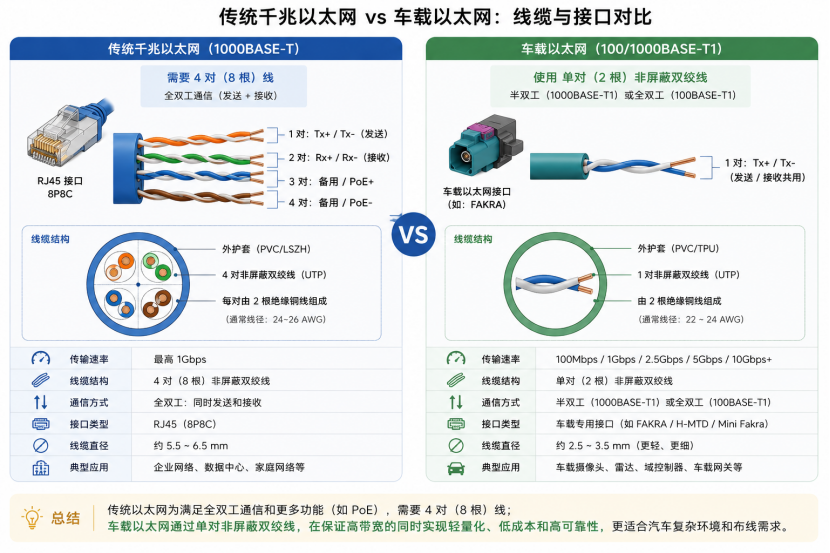
(1)物理层
为了符合汽车的物理和成本约束,车载以太网从物理层就做了改造:
与传统千兆以太网需要4对线不同,车载以太网使用单对非屏蔽双绞线就能在更少线束条件下实现百兆到千兆级传输。
车载以太网还可支持PoDL(数据线供电),即通过同一对双绞线为传感器供电,这可进一步减少线束的数量。
这可显著降低线束重量与连接器复杂度,在部分车型中,线束重量可下降约30%,连接器成本也可明显降低。
另外,为了能扛住车内外-40°C到+125°C的温差、强电磁干扰(EMI)、剧烈振动和高湿度的严苛的车规级环境,车载以太网相关的PHY芯片、电缆介质、连接器结构、EMC设计与材料工艺等方面均进行了专门强化。
(2)链路层安全:MACSec
这是一项由IEEE 802.1AE标准定义的数据链路层安全技术。
MACSec通过对以太网链路进行逐跳加密与完整性校验,可保护车内骨干网、V2X通信及诊断数据,防止窃听、伪造与篡改。
它是未来车载网络安全的关键技术,目前正在逐步落地。
(3)确定性网络(TSN)
汽车是关乎生命财产安全的,因此刹车、转向等关键指令的延迟必须可预测、有上限(有界延迟)。
TSN标准就是用于解决传统以太网在时间敏感场景下“可能丢包、可能延迟”的致命缺陷的:
机制一:对表。通过802.1AS协议,让全车网络同步到一个“标准时间”,精度可达亚微秒级。
机制二:排班。通过802.1Qbv协议,为关键数据开辟“专用快速通道”,保证准时、无干扰地送达。
机制三:插队。通过802.1Qbu协议,允许紧急指令“插队”,优先传输。
(4)汽车上层协议DoIP和SOME/IP
DoIP (Diagnostics over IP诊断协议):让诊断仪通过IP网络实现整车诊断与刷写,相比传统CAN诊断具有更高带宽与更快刷写速度。
SOME/IP (Scalable service-Oriented Middleware over IP服务通信协议):实现了ECU之间的“服务化”通信,使车辆功能能够像软件API一样被动态发现与调用,是软件定义汽车的重要基础。
四、机器人中的以太网
1. 应用简史
早期的工业机器人多为孤立工作的机械臂,因此通过专用控制柜和简单的数字I/O信号与外围设备通信即可,网络化程度极低。
1980年代,随着PLC(可编程逻辑控制器)在工厂自动化中的普及,机器人开始通过现场总线(如PROFIBUS、DeviceNet、CANopen)与生产线其他设备互联。
这些总线解决了连接问题,但带宽有限,通常1 Mbps以内、拓扑僵化,难以支撑更复杂的协同任务。
2000年代初,随着以太网技术成本的降低和工业级加固的进展,设备制造商开始尝试将以太网引入工业现场。
代表性事件是德国倍福(Beckhoff)于2003年推出的EtherCAT(用于控制自动化的以太网)。EtherCAT在标准以太网MAC层之上设计了“on-the-fly”处理机制,实现了微秒级的循环周期,成为高速运动控制的事实标准。
2010年代,工业以太网群雄并起,PROFINET(西门子主导)、EtherNet/IP(罗克韦尔主导)、POWERLINK、CC-Link IE等协议相继成熟,各自扩张。
与此同时,工业机器人的内部架构也开始从集中式控制器向分布式智能驱动演化,对通信网络的实时性和确定性提出了更高要求。
2020年代至今,TSN(时间敏感网络)与OPC UA的结合成为工业通信的新方向。
基于以太网的工业网络在新接入节点中的占比逐年上升,其中PROFINET以27%的份额领先,EtherNet/IP占23%,EtherCAT约占17%。
支持实时能力的OPC UA FX和VDMA OPC Robotics Companion Specification的推出,使机器人能够以统一的信息模型实现跨厂商的无缝互联。与此同时,移动机器人对无线连接的需求也推动着5G/Wi-Fi 6/7在物流与服务机器人领域的加速部署。
2. 机器人为何要采用以太网?
机器人领域采用以太网的核心驱动力可概括为以下四点。
(1) 实时性需求:运动控制向“硬实时”演进
机器人的本质是“运动装置”,其性能直接取决于控制指令的实时性和确定性。
据测算,在某电子装配产线中,部署5G工业路由器后,机器人协同作业的时延从80ms降至2ms,产线综合效率提升25%。
这一数据直观说明了:通信时延不仅是网络指标,更直接关系到产线节拍和机器人协作效率。
传统CAN总线周期通常在1-2毫秒,而现代精密运动控制的要求是微秒级的循环周期。
基于以太网的实时协议(如EtherCAT、PROFINET IRT)能将循环时间压缩到31.25微秒,抖动控制在纳秒级。
这种“硬实时”能力是以太网能够替代传统总线的首要动因。
(2) 带宽需求:机器视觉与AI落地
现代机器人正从“执行器”变成“感知体”。
工业相机、3D视觉传感器、激光雷达等设备产生了传统总线无法承载的海量数据。
一个2D视觉系统的带宽需求约为125 MB/s,而一个3D视觉系统更可达625 MB/s以上。
因此机器人内部的千兆工业以太网逐渐普及,以满足机器视觉、环境感知等应用的高带宽需求。
(3) 生态开放:从“专有孤岛”到“互联互通”
传统机器人市场中,各大厂商(FANUC、ABB、KUKA、安川等)各自采用不同的专有通信协议,导致系统集成困难、软件复用度低。
OPC UA Robotics Companion Specification的出现,使得所有厂商的机器人都能共享统一的信息模型。
开放以太网生态的引入,大大降低了系统集成的门槛,也催生了基于ROS/ROS 2的机器人开发生态。
(4) 移动性与柔性制造:有线向无线的跃迁
AGV/AMR等移动机器人必须依赖无线通信,传统的现场总线无法满足移动场景的连接需求。
Wi-Fi 6/7提供局域高速连接,5G-A确保广域移动性,现代汽车集团已经开发出可同时处理Wi-Fi 6与专网5G的无线连接终端。
2025年HMS报告也明确指出,无线技术虽然占新装节点仅7%,但却是工业现场不可或缺的补充方案,尤其适用于AGV等需要灵活部署或物理布线受限的场景。
3. 机器人以太网的特点
(1) 物理层:
机器人以太网与办公以太网最大的区别,在于物理连接的“工业级加固”。
机器人工作环境充满振动、油污、粉尘、电磁干扰和水汽冲击——这与服务器机房的恒温恒湿环境形成鲜明对比。
M12连接器是机器人以太网在物理层最显著的标识。
它直接扎根于工业现场最严苛的“前线”:机器人关节、户外设备接口、设备产线终端等,面临振动冲击、液体侵蚀、强电磁干扰、化学腐蚀等复合型挑战。
其核心特性包含四大支柱:
全屏蔽设计应对变频器集群、大功率电机周边的强干扰环境,保障PROFINET、EtherCAT等实时协议的稳定传输;
IP67/IP68高等级防水防尘,避免液体渗入导致设备宕机;
拖链级柔韧性,能适应机器人、AGV移动单元等高频率弯曲场景,确保百万次弯折不失效;
阻燃与低烟无卤材料,契合轨道交通、化工等对安全要求严苛的领域。
相比之下虽然加固型RJ45在某些不受振动和水汽影响的机器人控制柜内部仍然可用,但与M12相比,其工业现场的可靠性差距明显。
(2) 工业以太网协议体系
与数据中心以太网的“大一统”不同,机器人领域存在多种相互竞争的工业以太网协议。
下表可以快速了解2025年全球工业以太网新接入节点的市场份额格局:
协议 | 市场份额 | 核心特点 | 主导厂商 |
|---|---|---|---|
PROFINET | 27% | 实时通信(RT)和等时通信(IRT),生态最广 | 西门子 |
EtherNet/IP | 23% | 基于CIP协议栈,北美市场主流,采用通用硬件和标准TCP/IP | 罗克韦尔自动化 |
EtherCAT | 17% | MAC层协议,on-the-fly处理,微秒级循环,拓扑灵活 | 倍福 |
Modbus TCP | 4% | 简单开放,历史最久 | Modbus-IDA |
POWERLINK/CC-Link IE/其他 | 约29% | 区域性强或生态偏小众 | 贝加莱/三菱等 |
EtherCAT:
EtherCAT(Ethernet for Control Automation Technology)采用独特的“on-the-fly”处理机制:
以太网帧在通过每个从站时,对应的从站以纳秒级速度读取/插入数据,然后立即将帧传递给下一个从站。
所以,EtherCAT的循环时间可短至31.25微秒,1000个数字I/O的刷新时间仅需30微秒,在机器人运动控制领域拥有不可替代的地位。
PROFINET:
PROFINET支持三种通信等级:
TCP/IP标准通信(非实时)、RT(实时,约10ms级)和IRT(等时同步实时,约1ms级且抖动受控)。
PROFINET的优势在于其生态:几乎所有主流机器人厂商(如KUKA、ABB、安川)都提供PROFINET接口选项。
另外,PROFINET的网络诊断能力和与PROFIsafe(功能安全)的深度集成,使其在汽车焊装、总装等高节拍生产线中占据主导地位。
EtherNet/IP:
EtherNet/IP使用标准TCP/IP和UDP/IP协议栈,支持通用以太网硬件设备,在实施便利性和成本方面具有一定优势。
在北美制造业中,它凭借与ControlLogix平台的深度集成稳居主流。同时,EtherNet/IP也已开始在食品、饮料和消费品等新兴领域加速扩张。
(3) 实时性与同步:IEEE 1588 PTP
机器人是多轴、多传感器协同工作的复杂系统,IEEE 1588精确时间协议(PTP)为其提供了关键的时间同步能力。
PTP的设计目标是在局域网内,使分布式系统中的所有时钟达到亚微秒级甚至纳秒级的同步精度。
对于人形机器人而言,PTP尤为重要:所有关节驱动器需要在同一个控制周期内执行协同动作,避免因指令到达时差导致动作“卡顿”甚至失衡;
视觉与IMU的数据需在时间上严格对齐,才能实现精准的SLAM定位和建图;多相机立体视觉要求各帧在同一瞬间捕获,以进行精确的深度计算。
机器人领域的PTP同步通常使用IEEE 1588标准,在精度上贴近TSN(亚微秒级)。
这与汽车以太网中的TSN时间感知整形器要求有相通之处:都在寻求全局分布式时钟下的确定性通信。
(4) 语义互操作:OPC UA
OPC UA(开放平台通信统一架构)可以解决“设备如何理解对方数据”的问题。
OPC UA是一种服务导向架构和统一的信息建模技术。它定义了数据的“语法”和“语义”,使得来自不同厂商的设备能够无缝通信。
在OPC UA基础上,VDMA(德国机械设备制造业联合会)与OPC Foundation联合发起了OPC Robotics倡议,专门面向机器人领域定义了统一的信息模型。OPC Robotics Companion Specification提供了独立于供应商的机器人和组件资产管理信息访问接口,支持状态对比和参数分析,帮助运维系统识别异常;同时,它覆盖资产全生命周期的管理和维护活动,使不同厂商的机器人能够无缝通信。
OPC UA是机器人以太网区别于汽车以太网的重要标志,它反映了机器人作为“离散制造”核心设备,对生态开放性和语义互操作的独特需求。
(5) 无线化趋势
AGV/AMR/人形机器人的兴起,使得有线以太网的物理锚点成为无法绕过的制约。
5G专网在工业自动化中的普及虽仍相对缓慢,但亚洲等地已有部分企业启动早期试点部署,中兴通讯与合作伙伴已在MWC上海展示了跨品牌机器人5G-A群体智能协作场景,单通道上行带宽超过100 Mbps,确定性时延≤10 ms,可靠性高达99.99%。
Wi-Fi 6/7则提供局域高速连接,中国联通的5G-A高中频1:1立体组网技术,在场馆外实现了4 Gbps上行和11.2 Gbps下行峰值速率,场馆内网络峰值亦可达到2.4 Gbps。
双网融合成为工业移动机器人的主流部署方式:
迈威通信在国内新能源汽车品牌AGV控制系统中创新研发了5G专网与Wi-Fi 6双网协同技术,通过智能网络调度机制实现秒级平滑切换,充分发挥5G广覆盖与Wi-Fi 6高带宽的优势。
现代汽车集团全球首次开发出可同时处理超高速、低延迟无线通信Wi-Fi 6与专网超高速5G的无线连接终端,并在韩美两国申请专利。
然而,无线化并不意味着“废除以太网” 。
在实际机器人系统中,无线通常作为“末端连接”出现在移动载体上,核心骨干网、机器人控制器之间的通信、机器人与产线PLC之间的确定性数据交换,仍然依赖于工业以太网。
机器人网络正在形成“有线为骨干保证确定性,无线为末端提供灵活性” 的分层架构——5G与Wi-Fi正在解决的是最后一米的连接问题,而非取代有线的核心骨架。
(6) ROS/ROS 2与以太网
机器人操作系统(ROS,Robot Operating System)本质上是一个分布式的进程通信框架,其默认通信中间件广泛基于以太网构建。
随着ROS 2对DDS(数据分发服务)的集成,机器人开发者可以直接使用以太网/UDP/IP进行节点间通信,从而实现对实时性要求的满足,以及将机器人软件无缝部署在工业以太网之上。
ROS 2与工业以太网协议的融合(如通过PLC与ROS 2的桥接)正在加速,推动着工业机器人与智能算法之间的深度协同。
4. 对比总结
下表从多个维度总结了机器人以太网与数据中心以太网、车载以太网的核心区别,可作为本节的参考速览。
对比维度 | 机器人以太网 | 数据中心以太网 | 车载以太网 |
|---|---|---|---|
核心目标 | 实时性(运动控制)、开放生态(互联互通) | 极致吞吐、低延迟、无损 | 安全性、确定性、轻量化 |
物理层 | M12工业连接器、IP67/拖链级/全屏蔽 | RJ45/光模块 | 单对非屏蔽双绞线、IP67 |
主流协议 | EtherCAT、PROFINET、EtherNet/IP | RoCEv2、TCP/IP | SOME/IP、DoIP、TSN/AVB |
确定性机制 | 分布式时钟(EtherCAT DC)、IEEE 1588 PTP | DCQCN+PFC、ECN | TSN(802.1AS/Qbv/Qbu) |
语义互操作 | OPC UA(核心特色) | 无 | 无(SOME/IP侧重服务调用) |
安全认证 | 工业安全标准(IEC 62443等) | 网络安全+ 数据加密 | ISO 26262(功能安全) |
无线扩展 | 5G/Wi-Fi 6/7(活跃应用) | 无(有线为主) | 少量(V2X等) |
速率演进 | 100 Mbps → 1 Gbps → 10 Gbps | 10G → 400G → 800G → 1.6T | 100 Mbps → 1 Gbps → 多千兆 |
典型应用场景 | 工业机械臂、AGV/AMR、服务机器人、人形机器人 | GPU集群互联、云存储 | 智驾域控、座舱域、OTA |
五、结尾
回到最初的问题:同样是以太网,为什么会在数据中心、汽车和机器人三个行业里长成三种模样?
答案其实很简单:以太网提供的是统一的通信底座,但每个行业真正关心的问题并不一样。
数据中心追求的是算力聚合的效率。
它要在一个恒温恒湿的机房里,把成千上万个GPU粘合成一台虚拟的超巨计算机。所以它需要的是极致带宽、无损传输和微秒级的端到端时延。
汽车追求的是生命安全与成本可控。
它要在-40°C的寒冬和+125°C的引擎舱之间颠簸运行,刹车指令必须在规定时间内必达。所以它需要的是确定性延迟、车规级可靠性和轻量化布线。
机器人追求的是实时协同与生态开放。
它要在充满油污、振动、电磁干扰的工厂里,与不同品牌的PLC、视觉系统和云平台无缝对话。所以它需要的是硬实时周期、M12物理加固和OPC UA语义互操作。
因此,以太网真正强大的地方,并不是它在所有行业中都保持一模一样,而是它能够在保持统一底层逻辑的同时,根据不同行业的需求不断变形、扩展和进化。
它既能成为数据中心里的“算力高速公路”,也能成为汽车里的“电子神经网络”,还能成为机器人系统中的“实时控制生命线”。
这也正是以太网诞生五十多年后,仍然没有被淘汰,反而不断进入新行业、新场景的根本原因: 它不是一项僵化的通信技术,而是一套能够持续适应产业变化的开放型基础设施。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-05-25,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号