OpenCV 5.0 来了,这次升级有点猛

OpenCV 5.0 来了,这次升级有点猛

javpower
发布于 2026-06-08 12:52:22
发布于 2026-06-08 12:52:22
OpenCV 5.0 来了,这次升级有点猛
6 月 5 号,OpenCV 官方正式放出了 5.0。说实话,等这玩意儿等了好几年了——从 2024 年底出 alpha,到 2025 年各种 roadmap 跳票,再到今年终于 gold release,整个社区都憋坏了。
我第一时间拉下来编译了一版,跑了跑自己的项目,也翻了翻 changelog 和 migration guide。这篇就聊聊 OpenCV 5 到底改了啥,值不值得升级,以及升级的时候会踩哪些坑。
先说结论:这版是 OpenCV 近十年最大的一次重构
OpenCV 4.x 从 2018 年活到了 2025 年底,中间修修补补发了十几个版本,但底层架构基本没动过。5.0 不一样,它动了根基。
几个最核心的变化:
- 最低 C++ 标准从 C++11 提到了 C++17,默认用 C++17 编译,后续还计划兼容 C++20/23
- C API 彻底删除了,
cvCreateMat()、cvFindContours()这些 1.x 时代的函数全没了,CvMat结构体也没了 - Python 2 支持砍掉了,只保留 Python 3.6+ 的绑定
- 许可证从 BSD 换成了 Apache 2,对专利问题的保护更好一些
- DNN 模块几乎重写,新引擎上线,ONNX 算子覆盖率超过 80%
- 内置 LLM/VLM 推理支持,对,你没看错,OpenCV 现在能跑大模型了
这些改动不是小修小补,是真正意义上的"换底盘"。
DNN 模块:这次重写是认真的

DNN 模块是这版改动最大的部分,也是我最关心的。之前 OpenCV 的 DNN 模块一直被人吐槽:ONNX 支持不全、动态 shape 处理拉胯、新算子跟进慢。4.x 时代勉强能用,但稍微复杂点的模型就各种报错。
5.0 直接引入了一个全新的推理引擎,跟老引擎并存。加载模型的时候可以通过 engine 参数选择用哪个:
// C++ 用法
auto net = cv::dnn::readNet(model, config, /*engine=*/cv::dnn::ENGINE_NEW);
# Python 用法
net = cv2.dnn.readNet(model, config, engine=cv2.dnn.ENGINE_NEW)
默认是 ENGINE_AUTO——先试新引擎,加载失败再回退老引擎。这个设计挺稳的,不会一升级就全崩。
新引擎几个关键提升:
**ONNX 算子覆盖率超 80%**。之前老引擎大概只能覆盖 50-60% 的 ONNX 算子,很多现代模型跑不了。新引擎把覆盖率拉到了 80% 以上,像 YOLOv8/v9 这类模型基本能直接跑了,不用再自己写后处理。
动态 shape 支持好了。以前跑动态输入尺寸的模型,经常要手动 reshape,新引擎对动态 shape 的处理顺畅多了。做目标检测的应该深有体会,不同分辨率输入不用再折腾 blob 尺寸。
内置格式解析器。ONNX、Caffe、TensorFlow、TFLite 的解析器都更新了,支持引擎选择。不用再依赖外部转换工具,直接 readNet 就行。
不过有个限制:目前新引擎只支持 CPU 后端,CUDA、OpenCL 这些 GPU 后端还在开发中,预计后续 5.x 版本会逐步补上。所以如果你重度依赖 GPU 推理,暂时还是得用老引擎。
LLM 和 VLM 支持:OpenCV 也要上大模型的车
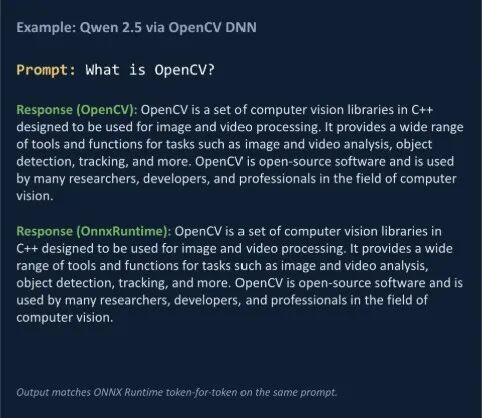
这可能是 5.0 最让人意外的功能——OpenCV 现在能跑大语言模型(LLM)和视觉语言模型(VLM)了。
具体来说,DNN 模块新增了对 Transformer 架构的支持,可以加载和推理基于 ONNX 格式导出的 LLM 和 VLM 模型。虽然性能上肯定比不了专门的大模型推理框架(vLLM、TensorRT-LLM 那种),但好处是:你不需要额外装一堆依赖,OpenCV 一个库搞定。
适合什么场景?我觉得是边缘端和嵌入式。树莓派、Jetson 上面跑个小型 VLM 做图像理解,不想装 PyTorch 也不想折腾 ONNX Runtime,直接用 OpenCV 的 DNN 模块加载模型就行。代码量少,依赖干净,部署简单。
官方演示里跑的是一些轻量级的视觉问答模型,效果还行。别指望在上面跑 GPT-4 级别的东西,但做 OCR + 场景理解、简单的图文匹配,够用了。
HAL 加速层:底层性能全面拉满
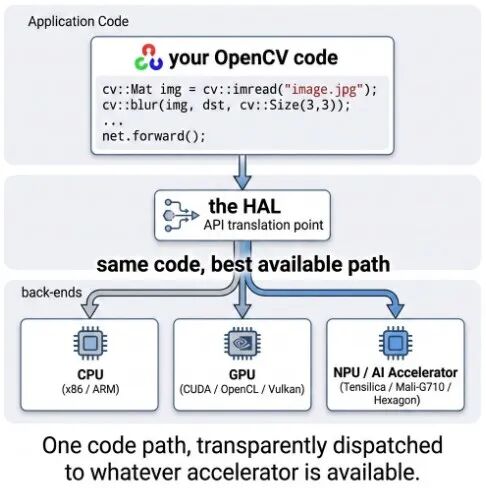
HAL(Hardware Abstraction Layer)在 5.0 里也大改了。简单说,OpenCV 的很多底层运算(滤波、矩阵运算、色彩转换等)都可以通过 HAL 接口让芯片厂商提供加速实现。
5.0 新增了大量 HAL 入口点,覆盖了更多函数。这意味着:
- ARM NEON:FP16 半精度 SIMD 指令加进来了,ARMv8 上的深度学习推理和图像处理会更快
- RISC-V RVV:Canny、Scharr、Sobel 这些经典算法有了 RISC-V 向量扩展的实现,做嵌入式视觉的终于不用裸跑了
- x86 AVX-512:Gaussian Blur 等算法做了 AVX-512 优化,高分辨率图像处理提速明显
- 通用数学函数:
v_exp、v_log、v_erf、v_sincos这些向量化的数学函数加进了 universal intrinsics,DNN 推理和图像处理都能受益
还有一个变化:UMat 正在从纯 OpenCL 方案迁移到通用异构 API(U-API)。以后 UMat 不只是 OpenCL 的 wrapper,而是能存任何 CPU 或非 CPU 的数组/张量。这对多后端部署是好事,但目前还在开发中,5.x 后续版本会逐步完善。
3D 视觉和相机标定:悄悄变强了
这块没 DNN 那么抢眼,但改动也不小:
- USAC 框架大幅优化:RANSAC 相关的算法(单应性矩阵、本质矩阵、PnP 求解等)在噪声数据集上效率显著提升。做 SLAM 和三维重建的应该能感受到
- 新的 Levenberg-Marquardt 实现:更快更准,非线性优化场景直接受益
- 多相机标定框架:多目相机联合标定更方便了,不用自己写一堆脚本串起来
cv::minAreaRect修复:角度范围终于统一到 [-90, 0) 了,之前不同版本行为不一致的问题搞疯了不少人
迁移指南:从 4.x 升级会踩的坑
官方出了迁移文档(GitHub wiki 上的 "OpenCV 4 to 5 migration"),我整理了几个最常见的坑:
1. C API 全没了
如果你代码里还有 CvMat、cvCreateMat()、IplImage 这些东西,编译直接报错。必须全部换成 cv::Mat 和对应的 C++ 接口。这个改动影响面很大,尤其是那些从 OpenCV 2.x 时代一路继承过来的老项目。
2. C++17 是硬性要求
编译器必须支持 C++17。GCC 7+、Clang 5+、MSVC 2017+ 都行,但如果你还在用 GCC 5 或者更老的编译器,就得先升级编译器。嵌入式交叉编译的注意一下工具链版本。
3. Python 2 彻底不支持了
还在用 Python 2 的……醒醒,2026 年了。cv2 模块只编译 Python 3 绑定,Python 2 的绑定直接没了。
4. OpenVX 被移除了
OpenVX 支持在 5.0 里被砍掉了。如果你之前用 OpenVX 做加速,需要迁移到其他后端(OpenCL、CUDA 或者 HAL)。
5. 一些 API 行为变化
cv::minAreaRect的角度范围统一为 [-90, 0),之前 4.5.1 到 4.12.0 之间版本行为不一致cv::convexHull对近零凸度的处理改了cv::solveCubic修了数值不稳定性,结果可能跟 4.x 略有差异InputArray/OutputArray对std::vector的处理更严格了,加了长度检查
6. DNN 引擎选择
如果你的模型在新引擎下跑不了,可以强制用老引擎:
net = cv2.dnn.readNet(model, config, engine=cv2.dnn.ENGINE_LEGACY)
建议先 ENGINE_AUTO 试试,不行再手动切。
pip 安装
最简单的方式,跟以前一样:
pip install --upgrade opencv-python
装完验证一下:
import cv2
print(cv2.__version__) # 应该输出 5.0.0
如果你需要 CUDA 支持,还是得自己编译。编译选项跟 4.x 差不多,就是 C++ 标准变了:
cmake -D CMAKE_BUILD_TYPE=Release \
-D CMAKE_CXX_STANDARD=17 \
-D WITH_CUDA=ON \
-D OPENCV_DNN_CUDA=ON \
..
我的升级体验
我自己有个项目,用 OpenCV 做工业视觉检测,主要用 DNN 模块跑目标检测 + 传统图像处理做测量。升级 5.0 之后:
- 传统图像处理部分(滤波、轮廓提取、模板匹配)基本零改动,直接编译通过
- DNN 部分,之前用 ONNX 跑 YOLOv5,老引擎偶尔会出算子不支持的警告,新引擎下没了,推理结果一致
- 编译时间比 4.x 长了大概 15%,应该是 C++17 模板和新增 HAL 代码的缘故
- 运行时性能,CPU 上大概快了 10-20%(AVX-512 机器),ARM 上提升更明显
总体来说,升级过程比预想的顺利。最大的坑是 C API 清理,不过我的项目本来就用 C++ 接口,所以没受影响。
值不值得升?
我的建议是:新项目直接上 5.0,老项目看情况。
如果你在做新项目,没有历史包袱,5.0 的 DNN 新引擎、LLM/VLM 支持、更好的 HAL 加速都是实打实的提升,没理由不用。
老项目的话,先跑一遍测试。C API 和 OpenVX 是硬伤,如果代码里大量用了这些,升级工作量不小。如果主要是 C++ 接口 + DNN,升级应该比较平滑。
有一点要注意:5.0 刚出,第三方生态(比如 opencv-contrib、各种语言绑定)可能还没完全跟上。生产环境建议等 5.1 或 5.2 再上,让社区先踩一轮坑。
相关链接
- OpenCV 5.0 官方公告:https://opencv.org/opencv-5/
- OpenCV 5 Wiki:https://github.com/opencv/opencv/wiki/OpenCV-5
- 迁移指南:https://github.com/opencv/opencv/wiki/OpenCV-4-to-5-migration
- Change Log:https://github.com/opencv/opencv/wiki/OpenCV-Change-Logs
- GitHub 仓库:https://github.com/opencv/opencv
OpenCV 从 1.x 到 4.x,走了快 20 年。5.0 这一波,砍 C API、上 C++17、重写 DNN、加 LLM 支持,算是真正迈进了现代 C++ 和 AI 时代。虽然有些改动会让老代码跑不起来,但长远看,这是必须要走的路。
搞视觉的兄弟姐妹们,可以开始折腾了。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-06-07,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号