宇树G1人形机器人拆解揭秘


从技术角度观察行业发展,努力跟上时代的步伐。公众号致力于点云处理,SLAM,三维视觉,具身智能,自动驾驶等领域相关内容的干货分享,欢迎各位加入,有兴趣的可联系dianyunpcl@163.com。
摘要
轻量化、低成本、高动态,宇树如何做到?
2025年,全球人形机器人出货量同比增长508%,宇树科技以超过5500台的出货量位居全球第一。其核心产品G1,售价仅8.5万元起,毛利率却高达40.7%。它是如何做到的?中邮证券研究所发布了一份详尽的宇树G1拆解报告,今天我们就来一探究竟。
售价与配置:从8.5万到30.9万,SKU丰富
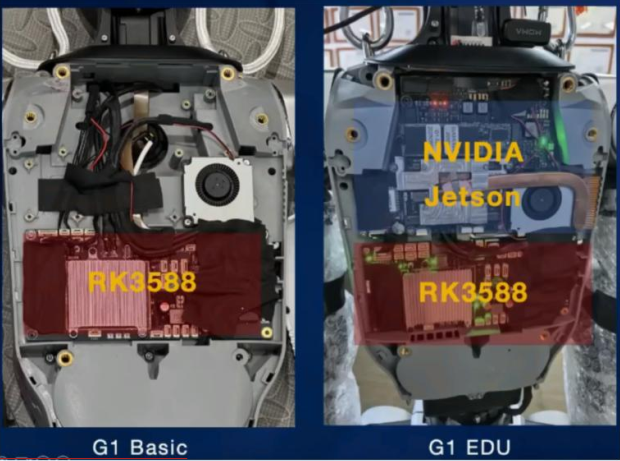
宇树G1基础版售价8.5万元(税后),身高1.32m,体重35kg,拥有23个自由度。EDU版本则根据配置不同,售价从16.9万元到30.9万元不等,自由度最高可达43个。
不同版本在算力、关节扭矩、灵巧手类型等方面均有差异,满足从科研教育到高端商演的多场景需求。

成本与毛利率:BOM成本仅4.16万,毛利率高达66.7%
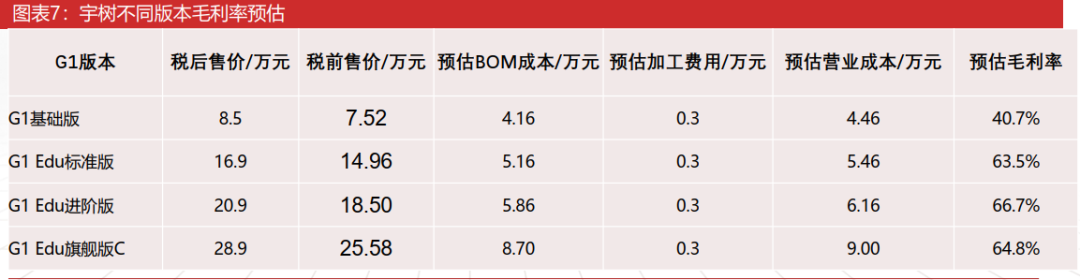
报告显示,G1基础版整机BOM成本约为4.16万元,其中核心关节成本约2.75万元。加上加工费用后,预估毛利率为40.7%。
而高配版EDU进阶版,毛利率更是高达66.7%。2025年前三季度,宇树人形机器人综合毛利率为62.9%,盈利能力远超行业平均水平。
供应链:自研为主,外采为辅
宇树在电机、驱动板、运控算法等核心部件上实现自研,减速器齿轮、交叉滚子轴承、灵巧手等则外采自美湖股份、洛阳佰纳、因时机器人等企业。
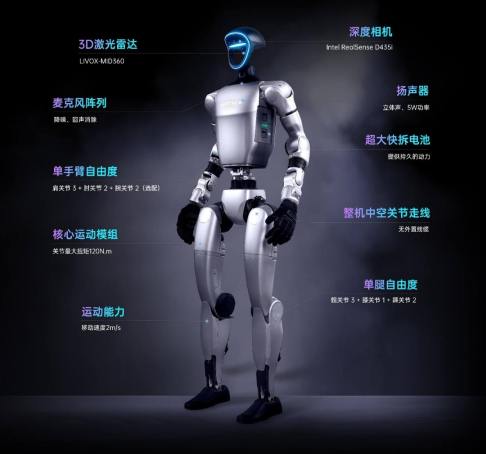
深度相机(Intel D435i)、激光雷达(大疆MID360)、主控芯片(瑞芯微3588)等则为成熟外采器件。

拆解亮点:关节、轻量化、线束、热管理
1
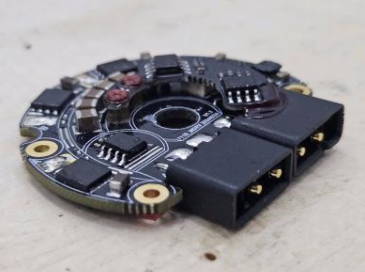
关节系统:四合一集成模组
G1全身23个关节,采用“电机-行星减速器-编码器-驱动器”四合一集成模组,中空内走线,设计紧凑。膝关节最大扭矩90N·m,手臂最大负载2kg。
2
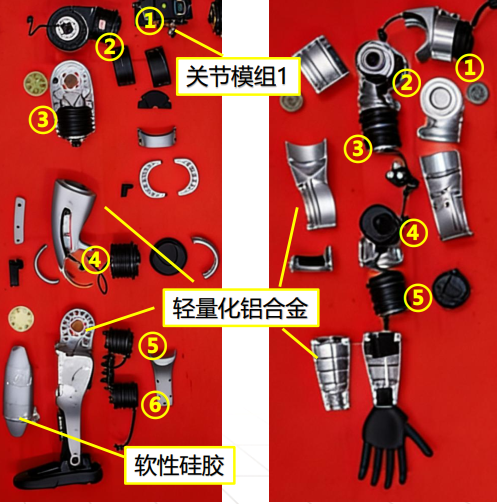
轻量化设计:35kg的极致平衡
整机仅35kg,关节占整机重量的49%。结构件以铝合金、工程塑料为主,仅小腿连杆用钢,拓扑镂空设计进一步减重。报告指出,继续减重空间已非常有限。

3
线束设计:标准化+电容缓冲
全身线束不超过10m,关节中空走线+标准化接口,末端配备电容缓冲网络,有效平抑电压尖峰,提升供电稳定性。
4
热管理:保守但够用
仅主控板和髋关节配备风冷主动散热,膝关节采用均热板被动散热。续航约1-2小时,适合商演、科研等场景,但不适合工业级连续作业。

四个关键结论
1
成本控制能力极强
宇树通过全栈自研+模块化设计+规模化量产,实现了极致的成本控制。2025年前三季度毛利率仍高达62.9%。

2
轻量化设计优秀
G1在保证高动态运动能力的同时,将整机控制在35kg,轻量化水平行业领先。

3
热管理偏保守,续航有限
1-2小时的续航和有限的散热设计,说明G1更适配短时高动态任务,而非工业级连续作业。

4
末端负载能力有限
G1自重35kg,单臂最大负载仅2kg,限制了其在工业场景中的应用。

行业展望:直线关节是未来方向
报告指出,纯旋转关节在人形机器人中存在扭矩密度、刚性和持续出力短板。直线关节具备高推力密度、高刚性与自锁优势,是未来工业级高负载人形机器人的最佳方案。

硬件无壁垒,软件定胜负
拆解显示,G1的核心硬件均为行业可采购的成熟器件,硬件本身并不构成高壁垒。真正让宇树脱颖而出的,是其自研的运控算法和世界模型,支撑起高动态运动与复杂场景适应能力。
总结
宇树G1是一款精准卡位商演+科研市场的产品,凭借极致的成本控制、优秀的轻量化设计和强大的运控算法,取得了巨大商业成功。
但它并不适合高负载、高精度、连续作业的工业场景。未来,宇树是否会推出搭载直线关节的工业级人形机器人,值得期待。
本文数据来源:中邮证券研究所《宇树G1人形机器人拆解报告》
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-04-04,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号