为什么现在的人形机器人都在用 ROS2?


公众号致力于点云处理,SLAM,三维视觉,具身智能,自动驾驶等领域相关内容的干货分享,欢迎各位加入,有兴趣的可联系dianyunpcl@163.com。文章未申请原创,未经过本人允许请勿转载,有意转载联系微信920177957。
摘要
过去一年,人形机器人行业发生了一个根本性转变:竞争重心从电机、减速器、硬件结构,迅速转移到软件架构、AI 系统、数据闭环和开发者生态。而 ROS2则正在逐渐成为当前机器人行业最主流的软件基础设施之一。尤其是在科研领域,开发者生态,人形机器人二次开发,AI Robot 系统集成方向。目前包括:AgiBot 的灵犀 X2,Unitree Robotics 的 G1。在开放生态层面,都明显基于 ROS2 构建了大量开发接口与系统架构。而国外大量新一代人形机器人公司,虽然未必直接公开使用 ROS2,但整体系统设计也正在逐渐走向:分布式、模块化、AI 友好型机器人软件架构。这其实与 ROS2 的核心设计理念高度一致。因为未来的人形机器人,本质上一定会是大型分布式 AI 系统,而只有类似 ROS2 这种分布式,模块化,支持实时通信,支持多节点协同的软件架构。才能真正支撑下一代人形机器人系统。
为什么人形机器人一定会走向 ROS2?
传统机器人(如工业机械臂)系统相对简单:轨迹控制、IO 控制、电机通信,通常运行在 PLC、单控制器或 RTOS 上,属于单体或紧耦合架构。
但人形机器人完全不同。它本质上是一个大型分布式实时 AI 系统:同时包含多路摄像头、激光雷达、IMU、足底传感器、双臂/双腿控制、状态估计、视觉感知、VLM/VLA、任务规划、语音交互。这些模块需要持续进行高速通信、低延迟同步、状态共享、实时协同。传统单进程或单控制器架构无法满足这种复杂度。
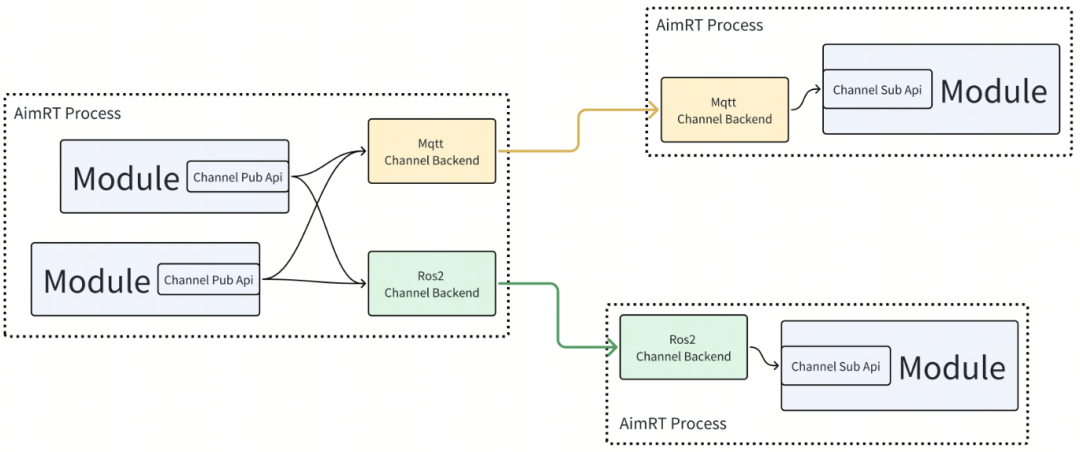
ROS2 核心价值就在于此:天然适合多节点、多模块、多计算单元协同。而 ROS2 相比 ROS1 的关键升级,在于底层采用 DDS(Data Distribution Service) 工业级实时通信中间件,具备以下特性:
- 去中心化:无需 ROS Master,节点自动发现
- QoS 支持:可配置可靠性、实时性、历史记录等策略
- 多机部署:天然支持分布式计算
对于人形机器人,这些特性至关重要—上半身可能运行 AI 推理、VLM、视觉感知,下半身运行强化学习控制器、MPC、电机控制,模块之间必须持续实时同步。任何通信延迟抖动、节点失联都可能直接导致步态不稳、控制失效甚至摔倒。DDS 恰恰解决了这些问题。
“小脑闭源,大脑开放”:ROS2 作为安全与生态的桥梁
当前人形机器人行业已形成统一的软件架构模式:小脑闭源,大脑开放。
- 小脑:电机控制、关节控制、实时运控、强化学习步态、MPC/WBC、底层状态估计。这些模块对实时性、安全性要求极高,一旦异常会导致机器人摔倒、硬件损坏。因此厂商普遍选择闭源,以二进制形式运行,确保稳定性与安全性。
- 大脑:感知、导航、任务规划、多模态交互、场景理解等上层智能能力。这些是生态竞争力的核心,厂商通常开放接口供开发者二次开发。
ROS2 在此架构中扮演关键角色:一方面,它承载小脑内部高频、实时的控制流(利用 DDS 的实时 QoS);另一方面,它连接大脑中各类 AI 模块与外部开发者生态。厂商将小脑封装为 ROS2 控制节点,对外只暴露符合 ROS2 标准的接口(Topic/Service/Action),内部实现闭源;开发者开发的大脑节点直接订阅这些接口,安全解耦。正是 ROS2让“小脑闭源 + 大脑开放”在保证安全的前提下最大化激发创新。

ROS2 之上的抽象层:AIMRT 与灵渠 OS 如何强化生态
人形机器人正迈向真正的“机器人操作系统”时代——不再是单体实时程序,而是拥有多进程、分布式节点、异构计算、动态部署特征的现代 OS。AIMRT 与灵渠 OS 正是这一趋势的代表,两者均以 ROS2 为核心基础设施,并在不同维度上扩展其能力。
AIMRT:面向机器人 AI 的运行时框架
AIMRT 定位为运行在 ROS2 之上的 AI 运行时框架,重点解决 ROS2 原生能力不足的 AI 任务调度问题:
- 多模块调度:大脑侧同时运行视觉、语言、决策等多模型,需要高效任务队列与优先级管理
- 推理任务管理:支持异步推理、批处理、模型热更新
- 多模型协同:例如 VLA、场景图感知与运动规划之间的数据协同
- 分布式部署:将不同模块部署在机载计算机、边缘服务器甚至云端,统一管理生命周期
- 高性能通信:在 ROS2 DDS 基础上优化共享内存、GPU 直通,减少端到端延迟
AIMRT 并不替代 ROS2,而是利用 ROS2 的节点发现、服务通信、工具生态(rviz、rosbag 等)作为底层基础,在 AI 任务调度层提供更高层次的抽象。没有 ROS2 的分布式通信能力,AIMRT 无法实现跨节点、跨设备的模型协同。
灵渠 OS:面向人形机器人的统一软件平台
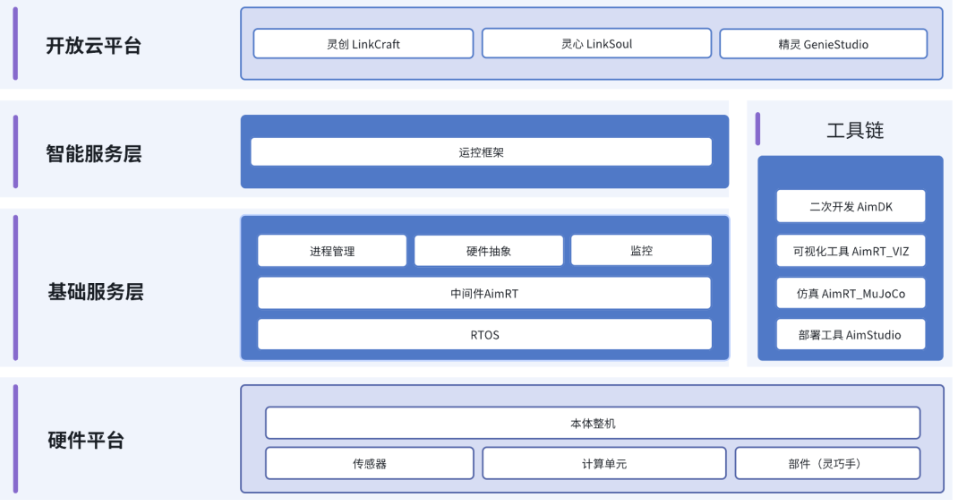
灵渠 OS 的目标更为宏大构建一个完整的面向人形机器人的软件体系,将感知、控制、推理、调度、通信统一起来。其核心特点包括:
- 分层融合:明确定义底层硬件抽象(融合不同电机、传感器)、中层实时控制(小脑)、上层智能引擎(大脑),通过统一 IPC 机制连接
- 安全与容错:针对小脑提供实时监控与失效保护(看门狗、状态回滚),对大脑异常行为进行隔离
- 开发者友好:统一 SDK、模拟器接口、数据记录与回放工具
- 与 ROS2 深度集成:灵渠 OS 将 ROS2 作为通信与生态基座,所有标准 ROS2 节点、工具均可无缝运行
灵渠 OS 的分层之间需要高性能、可配置的通信管道——这正是 ROS2 DDS 提供的。同时,灵渠 OS 通过 ROS2 接口兼容已有海量机器人算法包和驱动,避免生态重复建设。可以说,灵渠 OS 是“包装”在 ROS2 之上的操作系统发行版,而 ROS2 是其内核。
无论 AIMRT 还是灵渠 OS,最终都依赖 ROS2 完成系统级协同:
- 系统级通信:使用 ROS2 DDS 实现跨进程、跨设备、跨语言的数据分发
- 生态兼容:直接使用现有 ROS2 驱动、算法库、可视化工具
- 标准化接口:小脑封装为 ROS2 节点,大脑通过标准接口调用
- 数据闭环:rosbag 及扩展工具提供统一的采集、训练、回放管道
未来展望:人形机器人软件栈将形成类似 Linux 的生态
可以预见,未来几年人形机器人软件栈将呈现清晰的层次结构:
底层:厂商自研实时内核 + 闭源小脑(二进制形式,对外提供 ROS2 接口)
中间层:ROS2 作为通信与基础设施标准,AIMRT、灵渠 OS 等框架在其之上提供更高层抽象
上层:开源/半开源的感知、规划、交互模块,由学术界与产业界共同贡献,形成类似 Linux 发行版的生态
工具链:仿真(Isaac Sim、Gazebo)、数据平台、部署工具(Docker + ROS2)全面融合
ROS2 就是这个生态的“Linux 内核”,而 AIMRT、灵渠 OS 以及未来的各类发行版,则是内核之上的“发行版”与“桌面环境”。这种分层与开放,将让人形机器人像智能手机和云计算一样,爆发出真正的生态力量。

总结
人形机器人正经历从硬件驱动到软件定义的深刻变革。“小脑闭源,大脑开放”的架构模式,既保证了底层控制的安全与实时,又释放了上层智能应用的生态潜力。而 ROS2 作为分布式、模块化、AI 友好的核心通信框架,已成为这一模式的“操作系统内核”。AIMRT 与灵渠 OS 等新兴平台并非要取代 ROS2,而是在其基础上强化 AI 调度与统一平台能力,共同推动人形机器人从单体控制程序迈向真正意义上的“机器人操作系统”。随着这些基础设施的成熟,人形机器人将像今天的 Linux 或 Android 一样,形成庞大、开放、持续演进的开发者生态,成为下一代智能系统的关键基石。
📢 友情推广:如果你希望深入理解人形机器人的软件架构,智元开发者社区携手灵渠OS社区布道师、 ROS中国生态奠基人—张新宇教授正式推出 「从操控到智能:灵犀X2+灵渠OS机器人全栈开发实战营」。12场硬核直播,陪你跑通机器人二开的全流程!完整走通“小脑闭源 + 大脑开放”的真实机器人项目,点击“原文阅读”开始报名吧!
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-05-10,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号