只用RGB人类视频学会灵巧手操作:VIDEOMANIP把“看视频学抓取”变成可执行策略

只用RGB人类视频学会灵巧手操作:VIDEOMANIP把“看视频学抓取”变成可执行策略

梯度不陡
发布于 2026-05-18 20:17:42
发布于 2026-05-18 20:17:42
📋 论文信息
- • 标题: Dexterous Manipulation Policies from RGB Human Videos via 4D Hand-Object Trajectory Reconstruction
- • 机构: Carnegie Mellon University、Georgia Institute of Technology、Stanford University
- • 论文链接: https://arxiv.org/abs/2602.09013
- • 发布日期: 2026-02-09
- • 开源地址: 未提供(项目: https://videomanip.github.io)
导读
多指灵巧手最难的不是控制器本身,而是训练数据昂贵: 传统方案常依赖可穿戴设备、动捕系统或机器人遥操作采集。本文提出 VIDEOMANIP,目标是直接从普通 RGB 人类视频重建 4D 手-物体轨迹,再迁移到机器人手上训练抓取与操作策略。对想做“低成本数据驱动操作”的团队,这篇论文的价值在于给出了一条不依赖额外硬件的数据闭环。
实用摘要
- • 问题: 多指灵巧手的动作空间高维,且高质量示教数据采集成本极高,导致规模化学习困难。
- • 创新: 用单目 RGB 视频重建显式 4D 手-物体轨迹,并结合接触优化与演示合成(DemoGen)把单段人类视频扩展为可训练的机器人轨迹数据。
- • 结果: 抓取任务中,模型在 20 个物体上达到 70.25% 成功率;真实世界 7 个操作任务平均 62.86%,相对基于 retargeting 的方法提升 15.87%。
- • 可借鉴做法: 先做几何重建再做策略学习;把“接触合理性优化”与“轨迹多样化合成”作为从演示到泛化的两个关键模块。
- • 边界与风险: 重建质量强依赖视觉估计(手姿态、物体网格、相机信息);复杂遮挡、物体材质反光、极端视角下可能引入误差并影响最终策略稳定性。
方法拆解
论文核心流程可以概括为三步:
- 1. 从 RGB 人类视频估计手姿态、物体几何与相机相关信息,重建时序交互轨迹。
- 2. 将人手运动 retarget 到机器人手,并通过接触相关优化提升抓取可行性。
- 3. 用 DemoGen 从单条演示轨迹合成多样训练轨迹,训练抓取/操作策略以提升泛化。
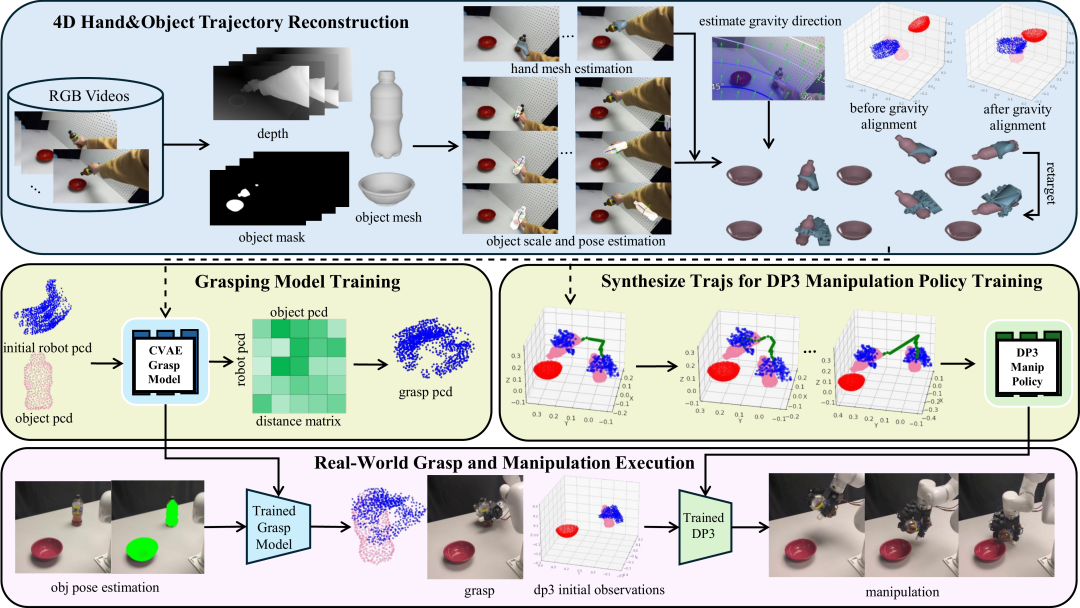
图1:VIDEOMANIP总体框架。先做4D重建,再做接触与轨迹层面的可执行化处理,最后用于策略学习。
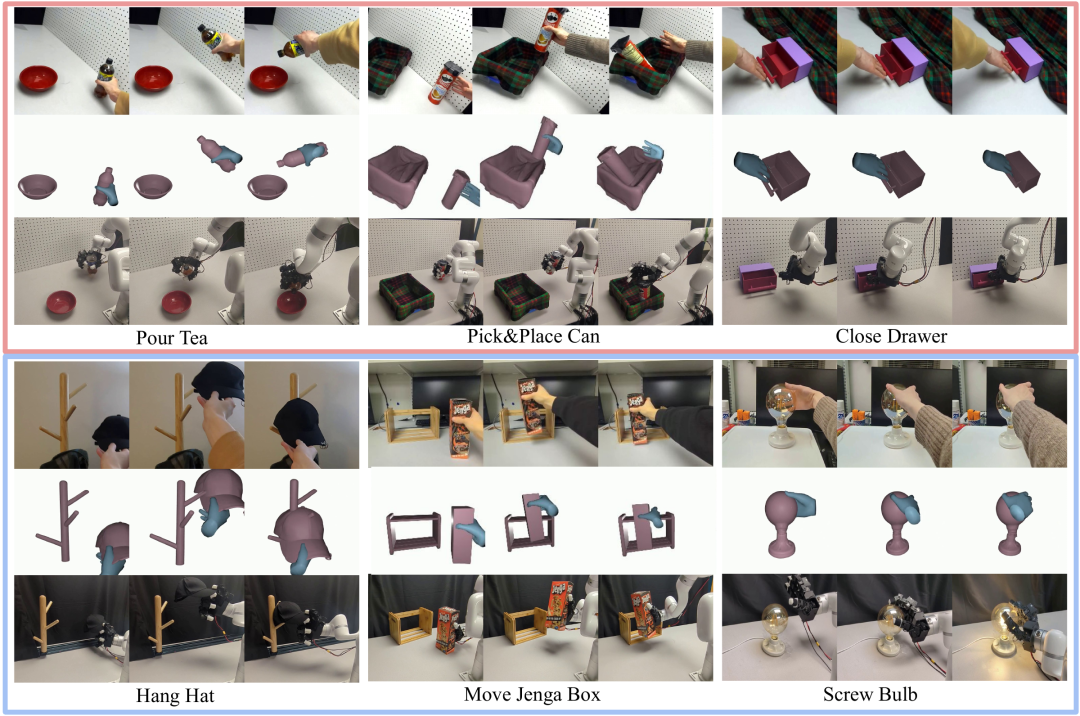
图2:来自 in-scene 与 in-the-wild 视频的数据都可进入重建与训练流程,最终在机器人手上执行。
工程上最有价值的一点是它把“看视频学操作”拆成了可调试的中间表示(轨迹、接触、重定向),而不是端到端黑盒模仿。
实验与结果
作者做了两类验证:仿真抓取与真实世界操作。
- • 仿真抓取: 在 Inspire Hand 上,20 个物体类别平均成功率达到 70.25%。
- • 真实世界操作: 在 LEAP Hand 上,7 个任务平均成功率 62.86%。
- • 对比收益: 相比 retargeting-based baseline,真实世界操作提升 15.87%。
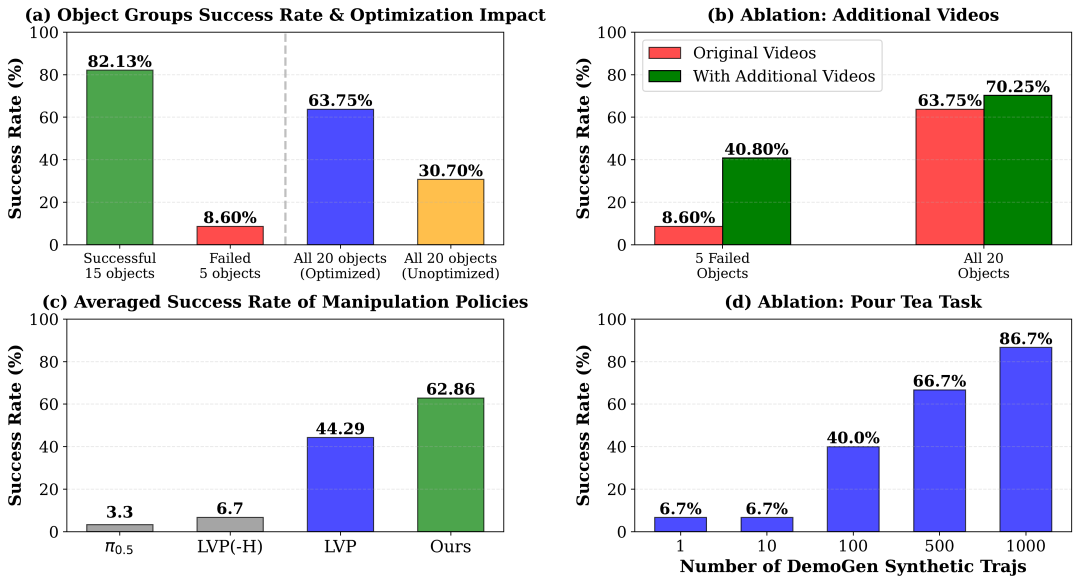
图3:抓取与操作的主结果图,展示了成功率对比和部分消融结论。
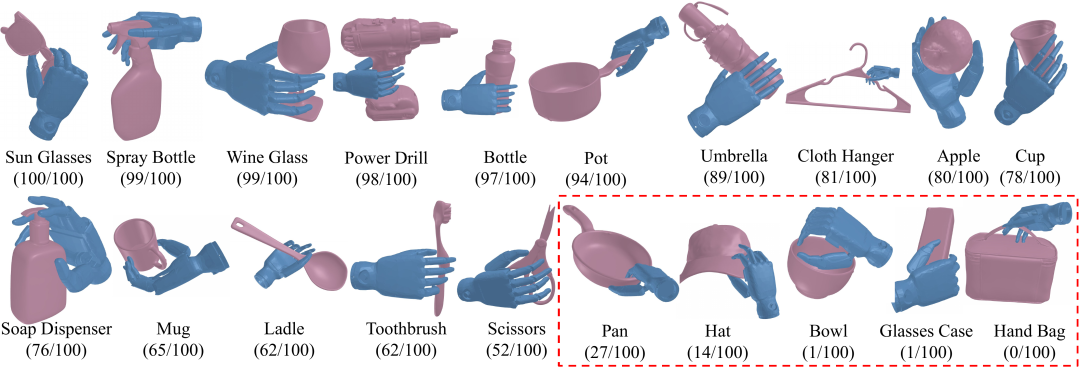
图4:不同物体上的抓取预测与成功率分布,体现跨对象泛化能力与失败案例。
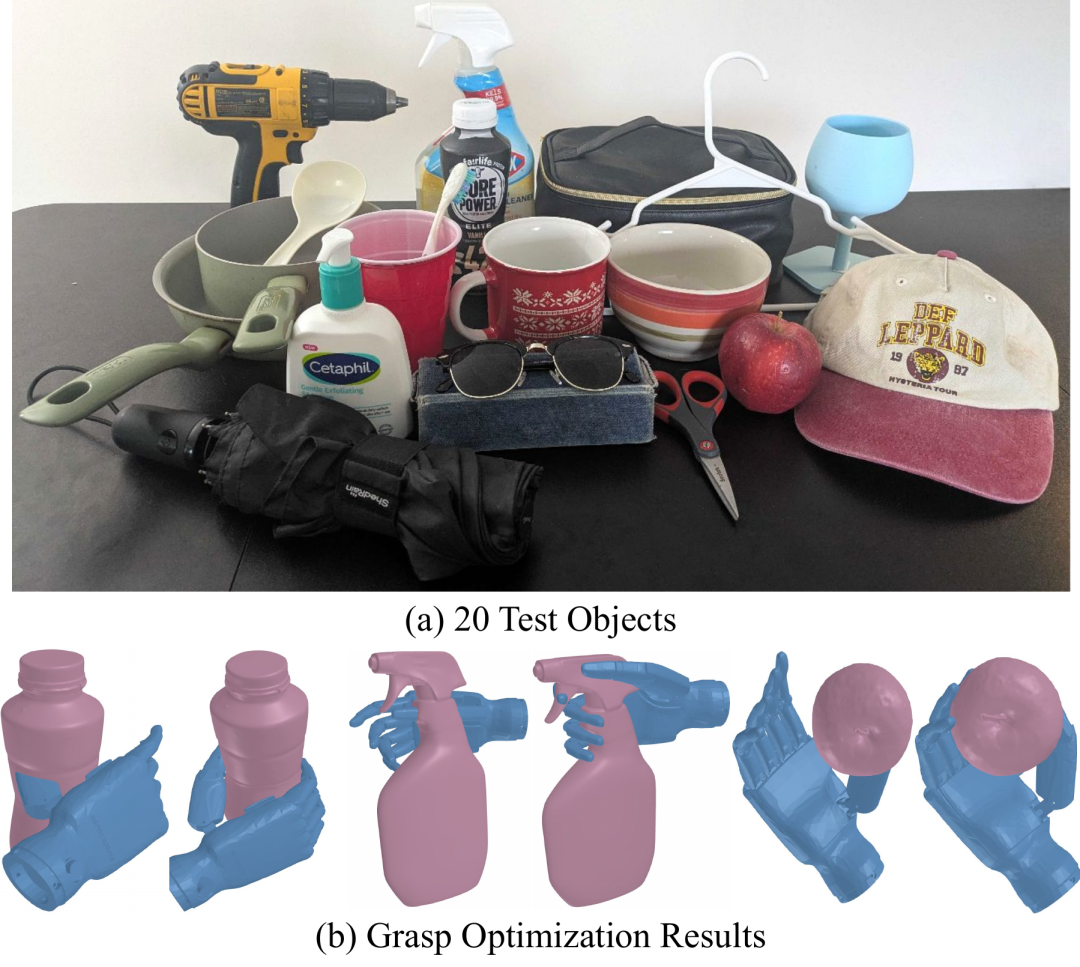
图5:训练对象集与接触优化效果示例,说明接触建模对可执行抓取姿态的重要性。
落地建议
- • 先把视觉重建质量做成可量化门槛(关键点误差、网格稳定性、时序抖动),再进入策略训练阶段。
- • 数据有限时优先投入在“轨迹合成多样性”而不是盲目增加策略模型复杂度。
- • 真实部署前把任务拆成抓取子目标和操作子目标,分阶段验收成功率与安全边界。
工程实现与复现要点
- • 数据侧: 论文展示了单视频可扩展训练轨迹的路径,适合“示教数据稀缺”场景。
- • 模型侧: 接触优化与交互中心化建模是提升抓取鲁棒性的关键,不建议省略。
- • 系统侧: 需要统一坐标系与机器人手约束,避免重建轨迹与控制接口不一致导致训练失真。
- • 评估侧: 建议同时统计任务成功率、轨迹可执行率、失败类型(滑移/未接触/早释放)来定位瓶颈。
结语
VIDEOMANIP证明了一件很实际的事:在不依赖穿戴设备和额外传感器的前提下,仅靠 RGB 人类视频也可以训练出具备可用成功率的灵巧手策略。它的意义不只在指标提升,更在于给出了“低采集成本 + 可解释中间表示 + 可迁移策略训练”的完整路线。对机器人团队来说,这是一条值得尽快小规模试点的技术路径。
扩展阅读
相关研究
- 1. 本文项目页(含视频): https://videomanip.github.io
- 2. 本文 arXiv 页面: https://arxiv.org/abs/2602.09013
技术工具与资源
- • Isaac Gym(文中仿真评测环境): https://developer.nvidia.com/isaac-gym
- • LEAP Hand(文中真实平台之一,建议按论文描述检索对应硬件与控制栈)
- • Inspire Hand(文中抓取实验平台之一,建议按论文描述检索对应硬件配置)
关键词: #论文解读 #机器人 #灵巧手 #模仿学习 #视觉重建 #操作策略 #工程落地
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-02-11,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号